АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Понятие определителя и его свойства
Каждой квадратной матрице  ставится в соответствие число
ставится в соответствие число  , называемое определителем. Понятие определитель связано с решением систем линейных уравнений.
, называемое определителем. Понятие определитель связано с решением систем линейных уравнений.
Определитель матрицы второго порядка  обозначается и вычисляется так:
обозначается и вычисляется так:  .
.
Определение определителя второго порядка. Определитель второго порядка равен разности произведений элементов главной  и побочной
и побочной  диагоналей.
диагоналей.
Определитель квадратной матрицы третьего порядка  определим так:
определим так:
 . (1)
. (1)
Равенство (1) называют разложением определителя третьего порядка по элементам первой строки. Для более компактной записи такого разложения вводят понятие алгебраического дополнения элемента определителя.
Алгебраическое дополнение  элемента
элемента  определяется равенством
определяется равенством
 . (2)
. (2)
Знак алгебраических дополнений, например для определителя третьего порядка в соответствии с первой частью формулы (2) можно символически определить так  .
.
Элемент  называется минором элемента
называется минором элемента  определителя
определителя  и получается вычеркиванием
и получается вычеркиванием  ой строки и
ой строки и  го столбца этого определителя. Например,
го столбца этого определителя. Например,
 ,
,  .
.
В результате дополнения будут иметь вид
 ,
,  .
.
На основании понятия алгебраического дополнения выражение (1) принимает вид
 .
.
Таким же образом определитель можно разложить по элементам любой строки или любого стлбца.
Например,  или
или  .
.
Совершенно аналогично определяются определители  го порядка.
го порядка.
 .
.
Рассмотрим свойства определителей, применение которых часто упрощает процесс вычисления определителей.
Вопрос 6:Свойства определителей
1.При транспонировании матрицы ее определитель не меняется
2.Если в определителе поменять местами две любые строки,два любых столбца,то определитель изменит знак на противоположный
3.Определитель не изменится, если к каждому элементу итой строки прибавит соотвествующий элемент катой строки, умноженный на любое число
4.Определитель равен нулю, если он имеет нулевую строчку или столбец
5.Определитель равен нулю, если он имеет 2 одинаковые строки(два одинаковых столбца)
6.Определитель равен нулю, если он имеет две пропорциональные строки(столбцы)
7.Общий множитель элементов какой-нибудь строки (столбца) можно вынести за знак определителя
8.Определитель равен нулю, если какая-либо из его строк(столбцов) является линейной комбинацией нескольких других строк(столбцов)
Для себя: два столбца умноженные на любое число равны третьему
9.Теорема Лапласа(способ вычисления определителей любых порядков)
Определитель равен сумме произведений элементов любой строки(столбца) на их алгебраическое дополнение 

Вопрос 7: Обратная матрица


Вопрос 8: Ранг матрицы



Вопрос 9:не нужно
Вопрос 10:Решение систем линейных уравнений методом Крамера
Теорема. Система из n уравнений с n неизвестными
в случае, если определитель матрицы системы не равен нулю, имеет единственное решение и это решение находится по формулам:
xi = дельтаi/дельта, где
дельта = det A, а дельтаi – определитель матрицы, получаемой из матрицы системы заменой столбца i столбцом свободных
членов bi.
Если система однородна, т.е. bi = 0, то при дельта не равное 0 система имеет единственное нулевое решение x1 = x2 = … = xn = 0.
При дельта = 0 система имеет бесконечное множество решений.
Вопрос 11:Матричный метод решения системы линейных уравнений
m=n
A*X=B
X=A^-1*B- формула для решения ур-ий в матричном виде

12.Решение систем линейных уравнений методом Гаусса. Совместные и несовместные системы линейных уравнений
Метод Гаусса (метод исключения известных)
Методом Гаусса можно решать любые совместные системы
Элементарные преобразования системы уравнений
1.Умножение обеих частей ур-ия на число, не равное нулю
2.Прибавление к одному из уравнений системы другого уравнения, умноженного на число, не равное 0.
3.Перестановка местами любые 2 уравнений
4. Вычеркивание одного из пропорциональных или одинаковых уравнений
Две системы уравнений называются эквивалентными, если их решения совпадают
Метод Гаусса- метод решения систем уравнений с помощью элементарных преобразований, осуществляющихся по следующей схеме:
1 туда:
1.Из всех уравнений системы, кроме 1, нужно исключить известное х1
2.Из всех уравнений системы, кроме 1 и 2 исключить неизвестное х2
3. Из всех уравнений системы, кроме 1,2 и 3 исключить неизвестное х3 и т.д.
2 обратно:
1. Из последнего уравнений системы найти хn
2. Представить найденное хn в предпоследнее уравнение системы и найти хn-1
При решении системы методом Гаусса вместо преобразований системы уравнений можно проводить преобразований над строками расширенной матрицы
13.не нужно
14.не нужно
15.не нужно
Вопрос 16:Скалярное произведение векторов.Евклидово пространство 

Евкли́довопростра́нство (также Эвкли́довопростра́нство) — в изначальном смысле, пространство, свойства которого описываются аксиомами евклидовой геометрии. В этом случае предполагается, что пространство имеет размерность равную 3, т.е. имеется y,x,z
17 и 18 не нужно
Вопрос 19.Прямоугольные координаты на плоскости
Прямоугольная (или декартова) система координат на плоскости задается парой взаимно перпендикулярных координатных осей, имеющих общее начало в точке О и одинаковый масштаб (рис.).

Оси координат на плоскости обычно обозначают Ох и Оу (оси абсцисс и ординат соответственно).
Координатную плоскость обозначают хОу.
Координатные оси делят плоскость хОу на четыре квадранта (или четверти): I, II, III, IV (рис.).
Пусть точка Р лежит на плоскости хОу. Опустим из этой точки перпендикуляры на координатные оси; основания перпендикуляров обозначим P[x] и P[y].
Абсциссой точки Р называется координата х точки P[x] на оси Ох, ординатой — координата у точки P[y] на оси Оу.
Координаты точки обычно указывают в скобках рядом с обозначением точки: Р(х; у).
Между точками на плоскости и парами их координат имеется взаимно однозначное соответствие.
Расстояние между двумя точками  и
и  на плоскости определяется с помощью теоремы Пифагора:
на плоскости определяется с помощью теоремы Пифагора:

Орты осей х, у — это единичные векторы I,j с началом в точке О.
Вопрос 20. Расстояние между двумя точками

Вопрос 21.не нужно
Вопрос 22:Прямоугольная система координат в пространстве. Компланарные вектора.
1.Компланарные вектора(а||в)- векторы, которые лежат на одной прямой или на параллельных прямых.
2.Два вектора называются равными, если они компланарны, одинаково направлены и имеют одинаковую длину.
Свободные векторы- это такие векторы, которые можно переносить
Связные
Компланарные-три вектора в пространстве, если они лежат в одной плоскости или параллельных плоскостях.
Прямоугольная (или декартова) система координат в пространстве задается тройкой попарно перпендикулярных координатных осей, имеющих общее начало в точке О и одинаковый масштаб.
Оси координат в пространстве обычно обозначают Ох, Оу, Оz (оси абсцисс, ординат и аппликат соответственно).
В пространстве возможны правые (рис.)

и левые (рис.)

системы координат; мы будем использовать правую систему координат.
Орты осей Ох, Оу, Оz — это единичные векторы I,j.k с началом в точке О;
направления ортов совпадают с направлением осей.
Орты правой системы координат образуют правую тройку векторов.
Вопрос 23.Условие компланарности 3 векторов
Существует целый ряд условий для трех векторов, который отвечает заихкомпланарность.
Первое условие компланарности именно для трех векторов – это наличие среди трех имеющихся векторов хотя бы одного такого, который был бы нулевым.
Вторым условием является наличие в тройке векторов пары векторов, которые являются компланарными и делают компланарной всю тройку.
Третье условие компланарности логично вытекает из основного, принятым нами за условно базовое определение: линейная зависимость для тройки векторов определяет компланарность этой тройки согласно тому, что компланарность сама по себе и есть такая линейная зависимость.
Вопрос 24.Разложение вектора по 3 некопланарным векторам 

Вопрос 25.Прямоугольные координаты точки в пространстве
Координаты векторов и точек в прямоугольной системе координат называются прямоугольными координатами.
Координатами точки A в прямоугольной системе координат называются координаты ее радиус-вектора OA в стандартном базисе. В пространстве это коэффициенты x,y,z в разложении OA=xi+yj+zk, на плоскости — коэффициенты x,y в разложении OA=xi+yj, на прямой — коэффициент x в разложении OA=xi. Прямоугольные координаты точки (или ее радиус-вектора) можно представить координатным столбцом:
 в пространстве и
в пространстве и  на плоскости.
на плоскости.
Вопрос 26.Расстояние между двумя точками в пространстве. Проекции ветора на координатные оси.
Расстояние находится по формуле 
Проекцией вектора а на координатную ось называют длину отрезка между проекциями начала и конца вектора а (перпендикулярами, опущенными из этих точек на ось) на эту координатную ось.
(Проекцией вектора на координатную ось называют скалярную величину, равную произведению модуля проектируемого вектора на косинус угла между направлениями вектора и выбранной оси).
Проекция вектора, перпендикулярного оси, всегда равна нулю
Проекция вектора, сонаправленного с осью, положительна и равна его модулю, например, sx = s
Проекция вектора, противонаправленного оси, отрицательна и равна его модулю, взятому со знаком «минус», например, sy = –s
Вопрос 27 Условие коллинеарности 2 векторов.
Вектора, параллельные одной прямой или лежащие на одной прямой называют коллинеарными.
Два вектора коллинеарные, если отношения их координат равны.
Два вектора коллинеарные, если их векторное произведение равно нулю.
Вопрос 28.Деление отрезка в данном отношении
Вычисление координат некоторой точки С, которая делит заданный отрезок АВ в определенном отношении, может быть выполнено по формулам:
хС = (хА + λхВ) / (1 + λ), уС = (уА + λуВ) / (1 + λ),
где (хА; уА) и (хВ; уВ) – координаты концов заданного отрезка АВ; число λ = АС/СВ – отношение, в котором отрезок АВ делится точкой С, имеющей координаты (хС; уС).
Если отрезок АВ делится точкой С пополам, то число λ = 1 и формулы для хС и уС примут вид:
хС = (хА + хВ)/2, уС = (уА + уВ)/2.
Нужно иметь ввиду, что в задачах λ – это отношение длин отрезков, а поэтому числа, входящие в данное отношение не есть длины самих отрезков в заданной единице измерения. Например, АС = 12 см, СВ = 16 см: λ = АС/СВ = 12 см / 16 см = 3/4.
Вопрос 29.Скалярное произведение 2 векторов и его св-ва. Косинус угла между ними
Вопрос 30.Уравнение прямой на плоскости, проходящей через данную точку перпендикулярно заданному вектору 

Вопрос 31.Общее уравнение прямой на плоскости 
Вопрос 32.Уравнение прямой с угловым коэфициентом

Вопрос 33:Уравнение прямой на плоскости, проходящей через 2 данные точки

Вопрос 35:Особые случаи общего уравнения прямой на плоскости

Вопрос 36:Угол между двумя прямыми на плоскости (случай, когда прямые заданы уравнениями в общем виде
Угол между двумя прямыми равен углу между их направляющими векторами.
Если прямые заданы следующими уравнениями:
A1x + B1y + C1 = 0 иA2x + B2y + C2 = 0,тогда направляющие векторы этих прямых будут равны:
a1 = (- B1; A1) и a2 = (- B2; A2)
Воспользуемся формулой скалярного произведения двух векторов:

из этой формулы получим: 
Выразим угол φ: 
Из последней формулы получим: 
Вопрос37. Угол между двумя прямыми на плоскости(случай, когда прямые заданы уравнением угловым коэффициентом


Вопрос 38:Условия параллельности и перпендикулярности прямых на плоскости
Условия параллельности и перпендикулярности двух прямых равносильны условиям параллельности и перпендикулярности их направляющих векторов 
Две прямые параллельны тогда и только тогда, когда их соответствующие коэффициенты пропорциональны:  – условие параллельности прямых.
– условие параллельности прямых.
Две прямые перпендикулярны тогда и только тогда, когда сумма произведений соответствующих коэффициентов равна нулю:
 – условие перпендикулярности прямых.
– условие перпендикулярности прямых.
Пример. Найти уравнения прямой проходящей через точку  параллельно прямой.
параллельно прямой. 
Решение. Поскольку искомая прямая параллельна данной прямой, то в качестве направляющего вектора искомой прямой можно взять направляющий вектор данной прямой.
По условию 

 – отсюда уравнение искомой прямой имеет вид:.
– отсюда уравнение искомой прямой имеет вид:.  :
: 
Вопрос 39:Расстояние от точки до прямой на плоскости

Вопрос 40:Уравнение плоскости, проходящей через данную точку,перпендикулярно
Заданному направлению
заданному н 
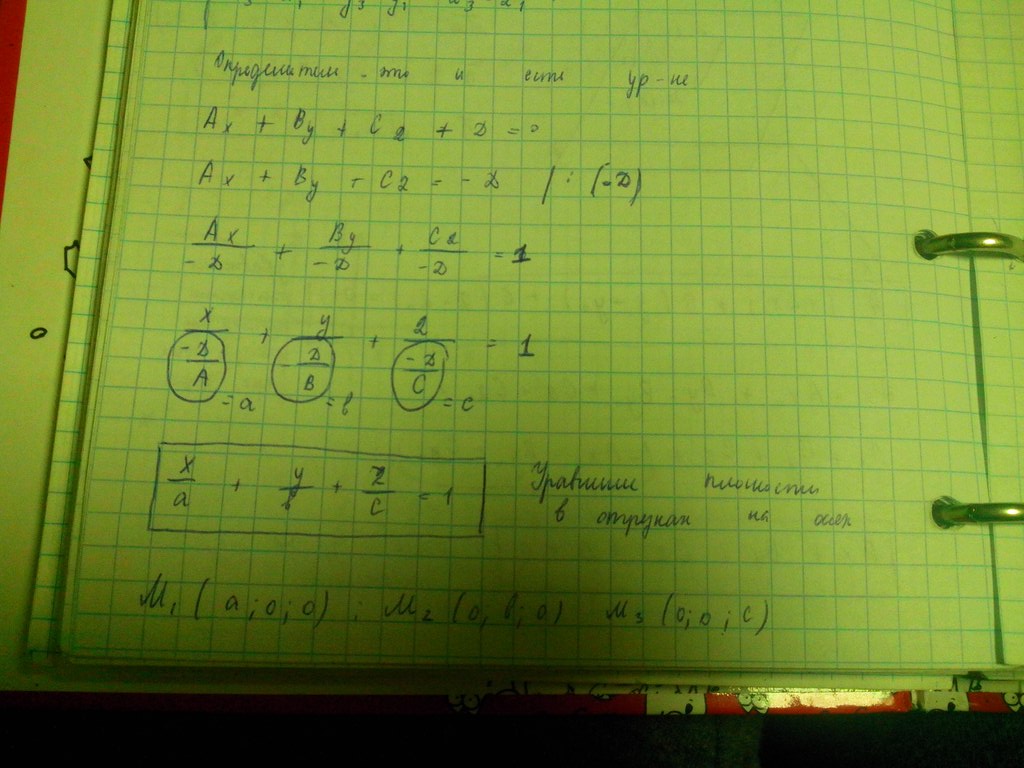
Вопрос 41:Уравнение плоскости в отрезках
Вопрос 42: Условие параллельности и перпендикулярности плоскостей

Вопрос 43:Расстояние от точки до плоскости

Вопрос 44:Виды уравнений прямой в пространстве 

Вопрос 45: Угол между двумя прямыми. Угол между прямой и плоскостью



Поиск по сайту: