АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Линейные системы автоматического регулирования
Линейными называются объекты и системы, подчиняющиеся принципусуперпозиции, который заключается в том, что реакция объекта (системы) на сумму входных сигналов Sxi(t) равна сумме реакций на каждый сигнал в отдельности для любых xi(t). В частности, линейными являются объекты, описываемые линейными дифференциальными уравнениями, т.е. уравнениями, в которых искомая функция и все ее производные содержатся в первой степени. Следует подчеркнуть, что выполнение принципа суперпозиции необходимо не только в установившихся режимах, но и в переходных процессах. Поэтому линейность статических характеристик является необходимым, но не достаточным условием линейности объекта.
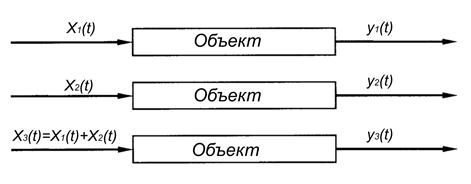
Иллюстрацией принципа суперпозиции служит эксперимент, который может быть проведен на объекте для проверки его линейности (рис. 5). Этот эксперимент должен состоять по крайней мере из трех опытов:
1-ый опыт: на вход объекта подается сигнал x1(t), определяется изменение выходной координаты под действием этого сигнала y1(t);
2-ой опыт: на вход объекта подается другой сигнал x2(t) и фиксируется cooтветствующее ему изменение выходной координаты y2(t);
3-ий опыт: на вход объекта подайся сигнал x3(t)=x1(t)+x2(t) и записывается реакция объекта на этот сигнал y3(t). Если для любого момента времени t(при любых x1(t) и x2(t) соблюдается равенство y3(t)=y1(t)+y2(t), то принцип суперпозиции выполняется и следовательно, объект линеен.
|
| Рис. 5 |
Как уже отмечалось, большинство реальных объектов управления являются нелинейными объектами. Однако в том случае, если нелинейность объекта проявляется в статических режимах и статические характеристики описываются аналитическими функциями, то при определенных условиях нелинейные характеристики объекта могут быть заменены приближенными линейными характеристиками, т.е.производится линеаризация нелинейных зависимостей (рис. 6).

|
| Рис. 6 |
Глава I.ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
§1. Переходныехарактеристики. Кривая разгона
Поиск по сайту: