АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
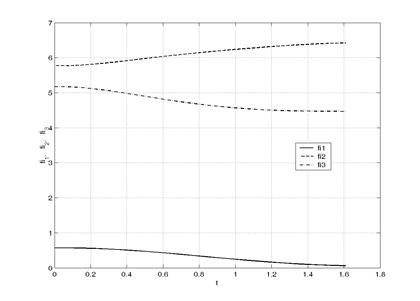
Результаты моделирования
Таблица 1
| t | fi1 | fi2 | fi3 | W1 | W2 | W3 | Vcx | Mb | Md |
| 0.5700 | 5.7700 | 5.1700 | -77.2544 | 39.1782 | |||||
| 0.0700 | 0.5700 | 5.7700 | 5.1700 | -0.0698 | 0.2053 | -0.2546 | 0.0399 | -77.2022 | 39.1517 |
| 0.1400 | 0.5651 | 5.7844 | 5.1522 | -0.1379 | 0.3819 | -0.4786 | 0.0783 | -77.4820 | 37.5650 |
| 0.2100 | 0.5555 | 5.8111 | 5.1187 | -0.2027 | 0.5043 | -0.6441 | 0.1133 | -78.0182 | 34.6192 |
| 0.2800 | 0.5413 | 5.8464 | 5.0736 | -0.2625 | 0.5728 | -0.7492 | 0.1434 | -78.6835 | 30.6875 |
| 0.3500 | 0.5229 | 5.8865 | 5.0211 | -0.3162 | 0.6010 | -0.8056 | 0.1674 | -79.3604 | 26.1459 |
| 0.4200 | 0.5008 | 5.9286 | 4.9648 | -0.3627 | 0.6034 | -0.8260 | 0.1846 | -79.9670 | 21.2920 |
| 0.4900 | 0.4754 | 5.9708 | 4.9069 | -0.4015 | 0.5905 | -0.8199 | 0.1948 | -80.4547 | 16.3442 |
| 0.5600 | 0.4473 | 6.0121 | 4.8495 | -0.4322 | 0.5697 | -0.7937 | 0.1982 | -80.7980 | 11.4651 |
| 0.6300 | 0.4170 | 6.0520 | 4.7940 | -0.4547 | 0.5456 | -0.7518 | 0.1952 | -80.9869 | 6.7806 |
| 0.7000 | 0.3852 | 6.0902 | 4.7413 | -0.4690 | 0.5210 | -0.6976 | 0.1868 | -81.0219 | 2.3904 |
| 0.7700 | 0.3523 | 6.1267 | 4.6925 | -0.4754 | 0.4976 | -0.6338 | 0.1739 | -80.9106 | -1.6278 |
| 0.8400 | 0.3191 | 6.1615 | 4.6481 | -0.4739 | 0.4759 | -0.5629 | 0.1576 | -80.6664 | -5.2170 |
| 0.9100 | 0.2859 | 6.1948 | 4.6087 | -0.4650 | 0.4555 | -0.4874 | 0.1390 | -80.3063 | -8.3408 |
| 0.9800 | 0.2533 | 6.2267 | 4.5746 | -0.4490 | 0.4356 | -0.4100 | 0.1193 | -79.8504 | -10.9829 |
| 1.0500 | 0.2219 | 6.2572 | 4.5459 | -0.4262 | 0.4147 | -0.3334 | 0.0994 | -79.3213 | -13.1472 |
| 1.1200 | 0.1921 | 6.2862 | 4.5226 | -0.3970 | 0.3912 | -0.2604 | 0.0803 | -78.7430 | -14.8555 |
| 1.1900 | 0.1643 | 6.3136 | 4.5044 | -0.3619 | 0.3636 | -0.1938 | 0.0627 | -78.1410 | -16.1457 |
| 1.2600 | 0.1390 | 6.3391 | 4.4908 | -0.3213 | 0.3302 | -0.1357 | 0.0472 | -77.5416 | -17.0686 |
| 1.3300 | 0.1165 | 6.3622 | 4.4813 | -0.2758 | 0.2903 | -0.0881 | 0.0340 | -76.9715 | -17.6845 |
| 1.4000 | 0.0972 | 6.3825 | 4.4751 | -0.2261 | 0.2433 | -0.0517 | 0.0232 | -76.4569 | -18.0591 |
| 1.4700 | 0.0813 | 6.3995 | 4.4715 | -0.1728 | 0.1896 | -0.0263 | 0.0149 | -76.0228 | -18.2586 |
| 1.5400 | 0.0692 | 6.4128 | 4.4697 | -0.1167 | 0.1301 | -0.0109 | 0.0086 | -75.6911 | -18.3454 |
| 1.6100 | 0.0611 | 6.4219 | 4.4689 | -0.0588 | 0.0663 | -0.0031 | 0.0038 | -75.4797 | -18.3731 |
| 
|

| 
|
Рис. 4
СОДЕРЖИМОЕ ОТЧЕТА О РАБОТЕ
Отчет должен содержать:
- титульный лист с указанием названия работы, фамилий исполнителя и преподавателя,
- номер варианта и содержание задания,
- листинг решения задачи,
- выводы по работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Можно ли решить задачи 4, 9, 15, 22, 25, если допустить проскальзывание звена 2?
2. Как изменятся уравнения движения и уравнения для определения управляющих моментов, если груз движется горизонтально со скоростью  ?
?
3. Как изменятся уравнения движения и уравнения для определения управляющих моментов, если груз движется с постоянной скоростью  или
или  ?
?
4. Можно ли задавать произвольным образом начальные значения углов  ?
?
5. Изобразить на рисунке графоаналитического решения векторы скоростей тех или иных точек.
6. Найти м.ц.с звеньев в произвольном положении механизма.
7. Объяснить по виду функции  характер изменения функции
характер изменения функции  .
.
8. Объяснить значение каждого оператора в программе.
9. Чему равна мощность двигателей при  ,
,  ?
?
10. Как изменились бы уравнения задач в случае инерционных звеньев манипулятора?
11. Дайте постановку прямой и обратной задач кинематики определения положения и ориентации рабочего органа манипулятора. Поясните сущность указанных задач, их назначение, приведите соответствующие примеры.
12. Дайте постановку прямой и обратной задач динамики манипулятора. Поясните сущность указанных задач, их назначение, приведите соответствующие примеры.
ЛИТЕРАТУРА
Основная
1. Динамика управления роботами / Под ред. Е.И.Юревич. – М.: Наука, 1984.
2. Кобринский А.А., Кобринский А.Е. Манипуляционные системы роботов: основы устройства, элементы теории. – М.: Наука. Главная редакцияфизико-математической литературы, 1985.
Дополнительная
3. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. – М.: Наука, 1979.
4. Галиулгин А.С. Обратные задачи динамики. – М.: Наука, 1981.
5. Новожилов И.В., Зацепин М.Ф. Типовые расчеты по теоретической механике на базе ЭВМ: Учеб. пособие для вузов. – М.: Высшая школа, 1986.
Поиск по сайту: