АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Датчики линейных ускорений (ДЛУ)
Обратная связь по перегрузке реализуется в ДЛУ типа акселерометров..
Акселерометры – это ДЛУ инерционного типа.
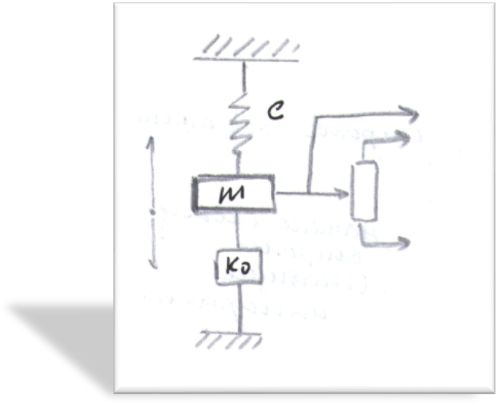
Ко – демпфер с коэффициентом демпфирования
Масса называется якорь.
х – ось чувствительности.
При перегрузке вдоль оси чувствительности позволяет определить ускорение.
Демпфер нужен чтобы сгладить инерциальные колебания, убрать из области измерений частоту резонанса. Демпферы обладают специальной конструкцией (неинерционные или демпферы переменной вязкости).

С-жесткость пружины
 - координата перемещения якоря
- координата перемещения якоря
При движение ракеты с ускорением
Масса якоря под действием  и демпфера
и демпфера  приобретает ускорение
приобретает ускорение 
 =0
=0
 - ускорение якоря относительно ракеты
- ускорение якоря относительно ракеты




 , тогда
, тогда



Необходимый декремент затухания регулируется регулировкой демпфера
В некоторых ракетах задача стабилизации осуществляется опосредовано через Vд, однако данное изменение не рекомендуется в силу необходимости сильного демпфирования канала управления (чтобы постоянная времени управления не превышала постоянную времени ракеты)
Поиск по сайту: