АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Лекция № 4. Стандартные функциональные блоки
Стандартные функциональные блоки. Функции управления. Примеры использования
Управление нагрузкой(SEL0)
Блок предназначен для управления от 1 до 8 однотипными агрегатами для получения заданной производительности (рис 5.3).
Имеются следующие функциональные входы:

PV – задание на производительность;
ST – состояние агрегатов (включен или выключен);
ALR – работоспособность (пригоден или непригоден для работы);
IV – задается производительность одного агрегата.
Выходы:
QV – предполагаемая суммарная производительность;
RUN – команда управления агрегатами.
Таким образом, при задании на входе PV суммарной производительности и на входе IV единичной производительности задача этого блока заключается в том, чтобы на выходе RUN сформировался сигнал, который запускает необходимое число агрегатов так, чтобы значение на выходе QV было не меньше чем на входе PV. Очевидно, что это невыполнимо, если значение PV будет превышать возможности имеющихся агрегатов. В этом случае будут включены все 8, а значение на выходе QV все равно будет меньше PV.
Вход ST должен иметь тип HEX и используется для получения информации блоком о том, какие агрегаты включены, а какие отключены в данный момент. Каждый бит этого входа характеризует состояние агрегата.
НАПРИМЕР: ST= 0000 0001=0001H (включен только первый агрегат),
ST= 0100 0010=0042H (включен 2-й и 7-й агрегат).
Вход ALR также должен иметь тип HEX и каждый его бит указывает о работоспособности агрегата (0 работоспособен, 1- неработоспособен). Входы ST и ALR не могут быть равны побитно, т.е. логическое побитное умножение значений этих входов должно иметь результат 0. В противном случае необходимо сформировать сигнал аппаратной недостоверности и соответствующее предупреждение должно быть передано в отчет тревог, выведено на мнемосхемы и записано в архив с целью контроля этой ситуации диспетчером и принятия решения по ее устранению.
На выходе RUN формируются команды на включение, каждый бит этого выхода управляет соответствующим агрегатом. 0 – выключить, 1 – включить. На выходе QV формируется предполагаемая производительность.
ПРИМЕР ЗАДАЧИ:
Обеспечить управление освящением теплицы величиной не менее 100 люкс при условии, что в теплице расположено 8 рядов ламп дневного света. Каждый ряд обеспечивает освещенность в 15 люкс. Пример программы показан на рис. 1.
На рисунке 1 функциональные блоки: (-) – вычитания; (LIMIT) – ограничения входной величины; (UPV) – побитовой распаковки входного сигнала; (PB) – побитной упаковки; (-&) – побитового логического умножения.
Схема работает следующим образом. В блоке вычитания на входе AD необходимо установить заданную величину освещенности. На вход AS поступает сигнал с датчика освещенности. На выходе формируется значение их разности, которое поступает в блок ограничения. На входе MIN задаем константу 0, чтобы не допустить отрицательного значения на выходе, на входе МАX - задание, таким образом, выходная величина изменяется от 0 до 100 люкс.
Одновременно, поступающие сигналы с датчиков состояния агрегатов и с мнемосхем управления упаковываются побитно в значения типа HEX. В блоках PB при не нулевых значениях на входах соответствующий бит выходного сигнала будет равен 1. Т.е. к примеру на входе 0 и 2 установлены ненулевые значения, тогда на выходе будет значение 00000101=0005H.
На входе IV блока SEL0 задается единичная производительность. Закодированные сигналы с датчиков состояния и с мнемосхем управления, а также сигнал с блока ограничений поступают на входы ST, ALR и PV функционального блока, где происходит их обработка. командного сигнала на выходе RUN представляет собой код, каждый бит этого кода управляет работой 1-го агрегата. Для дешифрации этого кода предназначен блок побитной распаковки (UPV).
Закодированные сигналы с датчиков состояния и с мнемосхем управления параллельно поступают в блок побитного логического умножения и далее дешифруются для генерации сигналов недостоверности.
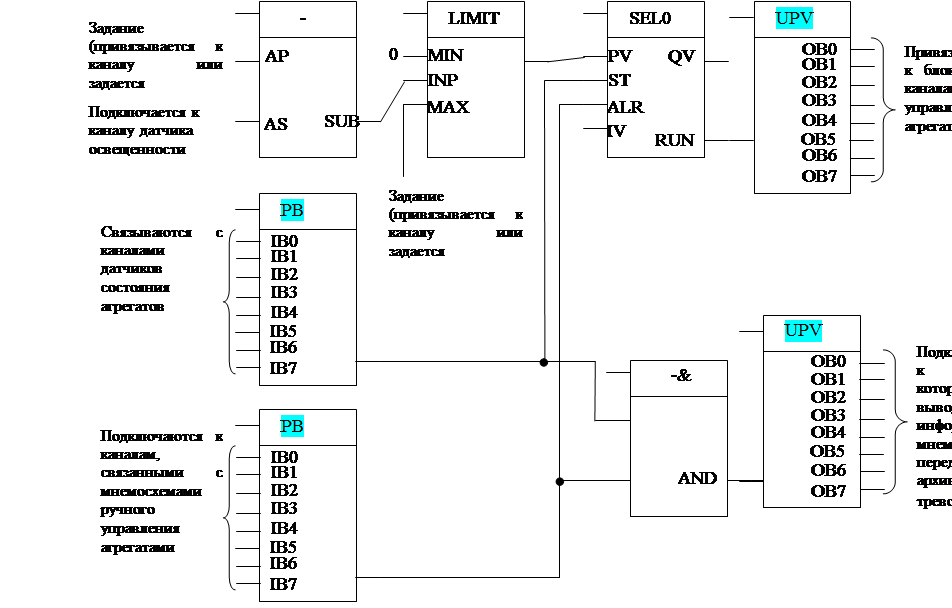 Рис. 1. Фрагмент программы управления освещенностью
Рис. 1. Фрагмент программы управления освещенностью
Управление двигателем (MOT)

Данный блок предназначен для управления одно- или двухскоростным мотором, снабженным входом (входами) включения и выключения. Кроме того, мотор может быть оборудован следующими цифровыми датчиками: датчиком включения на скорости 1, датчиком включения на скорости 2, датчиком выключения и датчиком нагрузки. По сигналам этих датчиков блок MOTOR может анализировать состояние мотора.
Блок MOTOR может находиться в следующих режимах: работа, резерв, ремонт и ошибка. Режим резерв имеет разновидности: активный резерв - с возможностью включения, пассивный резерв - без возможности включения
Блок имеет следующие функциональные входы:
CMD – команда управления:
 1 – включить на скорости 1;
1 – включить на скорости 1;
2 – выключить;
4 – в режиме активного резерва: включить на скорости 1;
8 – включить на скорости 2;
STS – перевод блока в нужный режим:
0 – блокировка команд CMD;
2 – разрешение команд CMD;
3 – перевод в пассивный резерв;
4 – перевод в состояние ремонт;
5 – перевод в состояние ошибка
6 – сброс ошибок, предыдущий режим запоминается;
7 – сброс ошибок, предыдущий режим не запоминается;
8 – перевод в активный резерв;
9 – перевод из состояния пассивного резерва в активный.
END – установленные в 1 биты этого входа интерпретируются следующим образом:
бит 0 – мотор включен на скорости 1;
бит 1 – мотор выключен;
бит 2 – наличие нагрузки (давление в трубопроводе);
бит 3 – мотор включен на скорости 2;
бит 4 – не анализировать сигнал датчика включения на скорости 1;
бит 5 – не анализировать сигнал датчика выключения;
бит 6 – не анализировать сигнал датчика нагрузки;
бит 7 – не анализировать сигнал датчика включения на скорости 2;
dT – максимальная длительность сигналов, генерируемых на выходах ON и OFF (в секундах);
ALR – ненулевое значение этого входа интерпретируется как команда аварийного выключения мотора, при этом блок переводится в режим ошибка. Эта команда имеет наивысший приоритет;
T – в течение (dT + T) секунд с момента подачи команды блок ожидает прихода подтверждающих сигналов датчиков (см. описание выхода ERR);
CHK – Предназначен для тестирования блока управления мотором. Установленные в 1 биты интерпретируются следующим образом (все команды CHK имеют более высокий приоритет по сравнению с аналогичными командами других входов блока):
биты 0, 1, 2, 3 – ручная команда включения/выключения;
бит 5 (0x20) – аналог STS (вход)=7;
бит 6 (0x40) – разрешение анализа сигнала датчика нагрузки;
бит 7 (0x80) – отслеживание по сигналам датчиков включения и выключения;
бит 8 (0x100) – установка бита 7 (0x80) в случае ошибки;
бит 10 (0x400) – блокировка команды включения по CHK;
бит 9 (0x200) – аналог STS (вход)=6;
бит 11 (0x800) – блокировка команды выключения по CHK;
бит 12 (0x1000) – установка бита 6 (0x40) выхода STS (в режиме работа- этот бит равен 0);
бит 13 (0x2000) – разрешение команд CMD;
бит 14 (0x4000) – разрешение отработки команды CMD =1 в резерве;
бит 15 (0x8000) – запрет STS (выход)=5 (кроме прямой команды ALR).
При использовании с блоком SBRK: при установке бита 15 необходимо установить бит 8.
Выходы блока имеют следующее назначение:
STS – коды, индицируемые на этом выходе, соответствуют следующим состояниям (при ручном управлении по CHK дополнительно устанавливается бит 4 (0x10) STS):
0 – инициализация;
1 – включен на скорости 1;
2 – выключен;
3 – в активном резерве, двигатель выключен;
4 – в состоянии ремонт;
5 – в состоянии ошибка;
6 – выключен и запрещены команды (STS (вход)=0 и нет CHK =0x2000);
7 – включен и запрещены команды;
8 – включен на скорости 2;
9 – процесс включения на скорости 1;
10 – процесс выключения;
11 – в состоянии пассивного резерва;
12 – холостой ход;
13 – процесс включения на скорости 2;
14 – перевод в ACTIVE_RESERVE с выключением;
15 – ACTIVE_RESERVE, включен.
ON – в бите 0 этого выхода генерируются сигнал включения длительностью dT на скорости 1, в бите 2 – сигнал включения длительностью dT на скорости 2;
OFF – на этом выходе генерируется сигнал выключения;
ERR – характеристика аварийной ситуации:
1 – одновременные сигналы любых двух или всех трех датчиков включения и выключения;
2 – мотор выключен внешними средствами (т.е. не с помощью блока MOTOR);
3 – мотор включен внешними средствами (на любой скорости);
4 – в течение (dT+T) секунд после подачи команды выключения не пришел подтверждающий сигнал от датчика выключения;
5 – в течение (dT+T) секунд после подачи команды включения не пришел подтверждающий сигнал от датчика включения;
6 – в течение dT секунд после подачи команды включения не сброшен сигнал датчика выключения;
7 – в течение dT секунд после подачи команды выключения не сброшен сигнал датчика включения;
8 – блок переведен в режим ошибка по STS =5. Значение 8 индицируется также при любой ошибке кроме тех, которые индицируются другими кодами ERR;
9 – отработана команда аварийного выключения двигателя ALR <>0;
10 – при включенном моторе (на любой скорости) исчезла нагрузка;
11 – нет подтверждающего сигнала ни от одного из трех датчиков включения и выключения;
12 – в состоянии мотор выключен или в резерве и появилась нагрузка;
14 – скорость изменена внешними средствами.
Поиск по сайту: