АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Алгоритм решения ЗЛП графическим методом
1. Находим область допустимых решений системы ограничений задачи.
2. Строим вектор-градиент  .
.
3. Проводим линию уровня L 0, которая перпендикулярна вектору .
4. Линию уровня перемещаем по направлению вектора параллельно себе пока она не станет опорной к многоугольнику планов. Точка входа в область – точка минимума функции, точка выхода из области – точка максимума.
Если только одна общая точка с областью допустимых решений, то эта точка будет точкой экстремума и решение ЗЛП единственное.
Если окажется, что линия уровня проходит через одну из сторон ОДР, то в таком случае экстремум достигается во всех точках соответствующей стороны, а ЗЛП будет иметь бесчисленное множество решений. Говорят, что такая ЗЛП имеет альтернативный оптимум, и ее решение находят в виде выпуклой линейной комбинации решений  :
:

где  .
.
ЗЛП может быть неразрешима, когда определяющие ее ограничения окажутся противоречивыми (т. е. область допустимых решений окажется пустым множеством).
5. Находим координаты точки экстремума и значение целевой функции в этой точке.
Пример 38.1. Найти максимум функции  , если
, если
Решение.
Определим вначале многоугольник решений – ОДР.
Для этого построим прямые, которые ограничивают этот многоугольник:
I:  ; II:
; II:  ;
;
III:  ; IV:
; IV:  .
.
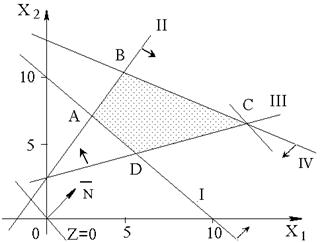
Каждая прямая отсекает отрезки на осях координат: I – (10;10); II – (-2;3); III – (-10;3); IV – (20;12).
Проверим справедливость каждого неравенства по одной точке (начало координат).
Рассмотрим первое неравенство:  . Начало координат (0;0) не удовлетворяет этому неравенству, поэтому область решения лежит по другую сторону от прямой I; это показано на рис. 38.4 стрелками.
. Начало координат (0;0) не удовлетворяет этому неравенству, поэтому область решения лежит по другую сторону от прямой I; это показано на рис. 38.4 стрелками.
Для второго неравенства  начало координат (0;0) удовлетворяет этому неравенству, поэтому область решения лежит по ту же сторону от прямой II, что и начало координат.
начало координат (0;0) удовлетворяет этому неравенству, поэтому область решения лежит по ту же сторону от прямой II, что и начало координат.
Рассмотрим неравенство  . Начало координат (0;0) не удовлетворяет этому неравенству, поэтому область решения лежит по другую сторону от прямой ІII.
. Начало координат (0;0) не удовлетворяет этому неравенству, поэтому область решения лежит по другую сторону от прямой ІII.
Рассмотрим неравенство  . Начало координат (0;0) удовлетворяет этому неравенству, поэтому область решения лежит по ту же сторону от прямой IV, что и начало координат.
. Начало координат (0;0) удовлетворяет этому неравенству, поэтому область решения лежит по ту же сторону от прямой IV, что и начало координат.
|
Замечание: Если ограни- чивающая прямая проходит через начало координат, то вместо точки (0;0) можно взять любую другую точку.
Рис. 38.4. Многоугольник решений
Образовалась область решения всех неравенств – это многоугольник АВСД – многоугольник планов.
Теперь строим градиент целевой функции. Это вектор: =  .
.
Далее  строим линию уровня, соответствующую
строим линию уровня, соответствующую  ; она проходит через начало координат и перпендикулярна . Перемещая ее в направлении вектора , видим, что наиболее отдаленной вершиной многоугольника является вершина С.
; она проходит через начало координат и перпендикулярна . Перемещая ее в направлении вектора , видим, что наиболее отдаленной вершиной многоугольника является вершина С.
Вычислим координаты этой вершины. Точка С лежит на пересечении прямых IIIи ІV. Решим систему уравнений этих прямых:

Откуда 
Следовательно, 
Пример 38.2. Найти минимум функции  , если
, если

Решение.
Для построения многоугольника решений можно использовать пример 38.1. Далее строим градиент целевой функции (рис. 38.5).
Это вектор: =  .
.

|
Строим линию уровня , она проходит через начало координат и перпендикулярна . Перемещая ее в направлении вектора = , видим, что вектор является нормальным вектором прямой III, значит линия уровня и прямая III параллельны, то есть при входе в область линия уровня совпадает с прямой DС.
38.5. Многоугольник решений
Вычислим координаты точек D и С, а также значение функции цели. Точка D лежит на пересечении прямых І и III. Решим систему уравнений:
Откуда 
Тогда 
Точка С лежит на пересечении прямых III и IV. Решим систему уравнений:
Откуда 
 ,
, 
Следовательно, минимум будет в любой точке отрезка DС:
 где .
где .
 .
.
Поиск по сайту: