АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Теоретические основы определения места судна
Навигационным параметром называется измеряемая на судне величина, связанная определенной функциональной зависимостью с положением судна относительно навигационного ориентира.
Градиентом навигационного параметра в общем случае называется вектор, характеризующий максимальное изменение навигационного параметра в данной точке, то есть характеризует величину изменения навигационного параметра на единицу расстояния. Градиент, как вектор, характеризуется величиной (модулем) и направлением.
Модуль градиента навигационного параметра есть предел отношения бесконечно малого приращения навигационного параметра DU к соответствующему смещению Dn навигационной изолинии или линии положения при Dn, стремящемся к нулю:
 .
.
При достаточно малых DU и Dn, что чаще всего бывает в судовождении, модуль градиента может быть вычислен по формуле:
 .
.
Градиент навигационного параметра направлен по нормали к навигационной изолинии или к линии положения в сторону, соответствующую увеличению навигационного параметра (рис. 4.1). Направление градиента относительно оси ординат (истинного меридиана) обозначается символом τ (рис.4 6.2).

Рис. 4.1 Градиент навигационного параметра.
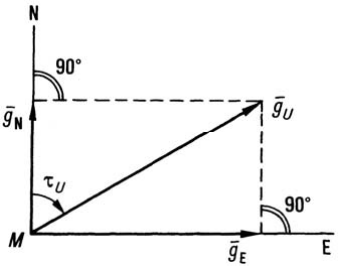
Рис. 4.2 Направление градиента навигационного параметра.
Градиент навигационного параметра имеет размерность единицы измерения навигационного параметра на единицу расстояния.
Каждому измеренному навигационному параметру (пеленгу, расстоянию, вертикальному и горизонтальному углу и т.д.) соответствует своя вполне определенного вида изолиния.
Изолинией называется геометрическое место точек на земной поверхности, в каждой из которых значение навигационного параметра является величиной постоянной.
Обсервацией называется процесс определения координат (географической широты и долготы) места судна на земной поверхности с использованием внешних (наземных, астрономических или космических) ориентиров, координаты которых известны.
Для определения обсервованного места судна необходимо измерить как минимум два навигационных параметра,тогда тогда место судна получится в точке пересечения двух навигационных изолиний. Этот способ называется способом изолиний.
Аналитически эта задача может быть решена решением системы уравнений двух изолиний.
Однако прокладка изолиний для большинства навигационных параметров на навигационной карте представляет определенные трудности.
Поэтому практически изолинии, как правило, на карте не прокладываются, а короткие их отрезки заменяются отрезками прямых линий или малыми по длине отрезками прямых, касательных к изолинии вблизи счислимого места.
Линией положения называется отрезок прямой, проведенный по касательной к изолинии на кратчайшем расстоянии от счислимого места судна (рис.4.3).
Линия положения, по сравнению с изолинией, обладает рядом преимуществ, что и обусловило столь широкое ее использование в практике судовождения. Уравнение линии положения в общем случае имеет вид:
Dj cosτ1+Dl cosj sinτ1=n1
где - Dj, Dl - поправки к счислимым координатам места судна;
- τi – направление градиента i-ой линии положения;
- ni=  – перенос линии положения, равный разнице между измеренным и счислимым навигационными параметрами.
– перенос линии положения, равный разнице между измеренным и счислимым навигационными параметрами.
- g – модуль градиента i-ой линии положения.
Метод линий положения предусматривает совместное решение системы уравнений линий положения, заменяющих навигационные изолинии, соответствующие измеренным навигационным параметрам. При использовании двух измеренных навигационных параметров такая система уравнений в общем случае будет иметь вид:
Dj cosτ1+Dl cosj sinτ1=n1
Dj cosτ2+Dl cosj sinτ2=n2
Обсервованные координаты места судна расчитываютсяпо формулам:
jо=jс + Dj;
lо=lс + Dl,
где - jс, lс – счислимые координаты места судна.

Рис. 4.3. Линия положения и ее элементы.
Задачу отыскания обсервованного места судна по двум линиям положения можно решить графически на морской навигационной карте или на планшете, или аналитически использованием вычислительной техники.
Этот способ называется способом линий положения.
Графическое решение (рис. 4.4).

Рис. 4.4. Графическое построение линий положения на карте и нахождение обсервованного места судна.
Аналитическое решение заключается в нахождении Δφ и Δλ и выполняется по следующим формулам:
 ;
;
 ;
;
 ,
,
где – φсч и φо – соответственно широта счислимого и обсервованного места судна.
Изолинии основных навигационных параметров, и формулы для расчета модулей и направлений градиентов этих параметров приведены в таблице 5.47 МТ-2000.
Поиск по сайту: