АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
ТЕМА № 12. «СИСТЕМЫ ТОПЛИВОПИТАНИЯ И АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ГТД»
Автоматическая система (АС) ГТД летательного аппарата включает управляемый объект - двигатель и автоматическое управляющее устройство.
Автоматическое управляющее устройство авиационного газотурбинного двигателя имеет фактически несколько самостоятельных автоматических систем. Автоматические системы, реализующие простые законы управления, называются также системами автоматического регулирования (САР).
На рисунке (для примера) представлена функциональная схема АС, включающей объект управления ГТД и САР.

В процессе автоматического управления двигатель испытывает управляющие и возмущающие (внешние и внутренние) воздействия. Регулирующие факторы (РФ) являются по отношению к двигателю управляющими воздействиями и служат входными сигналами, которые формируются определёнными контурами САР.
К внешним воздействиям относятся возмущения, обусловленные изменением окружающей среды, т.е. Р*в, Т*в и Рн.
К внутренним воздействиям относятся возмущения, обусловленные случайным изменением параметров проточной части двигателя, т.е. деформациями и боевыми повреждениями деталей двигателя, отказы и неисправности систем двигателя, в том числе и АС.
Изменение режима работы двигателя лётчиком осуществляется воздействием на РУД, а регулируемые (РП) и ограничиваемые (ОП) параметры, по отношению к объекту управления - двигателю, являются выходными сигналами системы. Как объект автоматического управления, двигатель характеризуется статическими и динамическими свойствами.
Статические свойства - проявляются на установившихся режимах работы и характеризуются зависимостью управляемых (регулируемых) параметров от управляющих факторов.
Динамические свойства - проявляются на переходных режимах, т.е. при изменении управляющих факторов и внешних возмущающих воздействий, и характеризуются собственной устойчивостью двигателя.
Собственная устойчивость двигателя - это способность двигателя после случайного отклонения от внешних или внутренних возмущающих воздеиствии самостоятельно возвращаться на исходный режим.
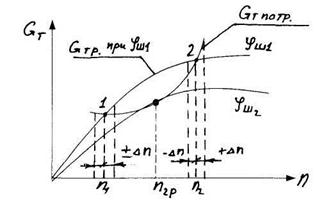
Выясним, устойчив ли ТРД с рассмотренной системой топливопитания. Для этого изобразим кривые потребной и располагаемой подач топлива в координатахGT, n. Кривая Gт.потр(n) определяет подачутоплива, потребную для обеспечения установившихся режимов с различными η (статическая характеристика). Кривая GT РАСП(n) является Характеристикой плунжерного насоса при заданном φш.
|
|
На режиме, соответствующем точке 2:
При ↑n до (n2+Δn) → GT РАСП < Gт.потр → ↓n до n2.
При ↓n до (n2-Δn)→ GT РАСП> Gт.потр → ↑n до n2.
Таким образом, на этом режиме двигатель самостоятельно возвращается на исходный режим, т.е. устойчив.
На режиме, соответствующем точке 1:
При ↑n до (n1+Δn) → GT РАСП > Gт.потр ↑n.
При ↓n до (n1-Δn)→ GT РАСП < Gт.потр → ↓n
Т.е. на этом режиме двигатель неустойчив.
Области устойчивых и неустойчивых режимов разделены точкой касания кривых потребной и располагаемой подач топлива. Этой точке соответствует режим работы с так называемой граничной частотой вращения nгр.
Итак, при n > nгр - двигатель устойчив n< nгр - двигатель неустойчив
Поэтому для обеспечения устойчивой работы двигателя в диапазоне n < nгр необходима автоматическая система (регулятор), управляющая подачей топлива в двигатель.
К тому же с увеличением высоты полёта nгр возрастает, т.е. диапазон устойчивых режимов уменьшается, и на больших высотах весь диапазон рабочих режимов может оказаться в неустойчивой области.

Следовательно, необходимо автоматическое управление подачей топлива во всём диапазоне, от nмг до nМАХ, что невозможно без автоматических систем.
Автоматические системы предназначены для управления подачей топлива в двигатель с целью обеспечения заданного (выбранного) закона управления.
Следует также сказать о необходимости автоматизации приёмистости и сброса газа.
Приемистость двигателя - это процесс быстрого увеличения тяги за счёт повышения расхода топлива при резком перемещении РУД вперёд.
Различают полную и частичную приемистость:
Полная прмемистость - приемистость с режима МГ до режима «максимал».
Частичная приемистость - приемистость с любого крейсерского режима до большего крейсерского режима или максимального режима.
Сброс газа - процесс быстрого уменьшения тяги двигателя за счёт снижения расхода топлива при резком перемещении РУД назад.
Приемистость и сброс газа оцениваются соответственно временем приемистости и временем сброса газа, т.е. временем с начала перемещения РУД до достижения заданного режима повышенной или пониженной тяги двигателя.
Время приемистости определяется:
■ Моментами инерции роторов двигателя;
■ Величиной избыточной мощности турбины (ΔΝ=Ντ-Νκ);
■ Расходом воздуха;
■ Частотой вращения (nНД) исходного режима;
■ Диапазоном устойчивой работы камеры сгорания от αΜIN до αΜAX;
■ Запасом устойчивости компрессора (ΔКУ);
■ Величиной максимально допустимой температуры перед турбиной
(T*г);
Время сброса газа зависит от:
■ Моментов инерции роторов двигателя;
■ Расходов воздуха;
■ Частоты вращения исходного режима;
■ Диапазона устойчивой работы к.с.;
■ Запаса устойчивости компрессора.
Условия боевого применения самолётов требуют как можно меньшего времени приемистостиτ (τприём) и сброса газа (τСБ), в значительной степени определяющего их манёвренные качества. Это одно из важнейших требований, предъявляемых к двигателям самолётов военной авиации.
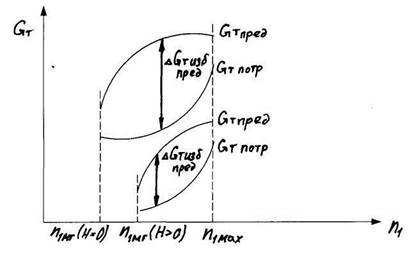
Перевод двигателя с пониженного режима на повышенный достигается избыточной (по сравнению с потребной) подачей топлива в к.с, обуславливающей появление на турбине избыточной мощности (ΔΝ). Очевидно, что чем больше ΔGТ.изб при прочих равных условиях, тем меньше τприём.
Однако, увеличение избытков топлива с целью ↓τприём ограничивается по причинам:
►Из-за ↓ΔКУ до 0 возникает неустойчивая работа компрессора;
► При ↑Т*Г> Т*Гmax возможно повреждение элементов к.с. и турбины;
► При ↓α < αΜIN произойдёт богатый срыв и погасание к.с. (самовыключение двигателя).
На основании анализа характеристик двигателя устанавливаются предельные избытки топлива (ΔGИЗБт.пред=Gт.пред-Gт.потр), подаваемого в процессе приемистости, которые обеспечивают минимальное τприём не сказываясь отрицательно на надёжности работы элементов двигателя, ΔGИЗБт.пред зависит от частоты вращения роторов и условий полёта самолёта (см. рис.).
Изучаемые АС nНД = const и GT = const не обеспечивают потребных подач топлива в процессе приемистости - переход насоса на повышенные GT оказывается слишком быстрым по сравнению со скоростью нарастания GB, которая определяется моментами инерции роторов двигателя. А управлять вручную темпом нарастания GT за счёт изменения скорости перемещения РУД практически невозможно.
Следовательно, в системе автоматического управления подачей топлива должны быть специальные автоматические устройства, которые управляли бы подачей топлива в процессе приемистости. Такие устройства называют автоматами приемистости.
При сбросе газа темп ↓GT также должен быть ограничен из условия недопустимости возникновения:
■ Неустойчивой работы компрессора;
■ Погасания к.с.
Поэтому обеспечение быстрого сброса газа (минимального τСБ) при сохранении устойчивой работы двигателя требует введения дополнительной автоматизации управления подачей топлива -установки в систему автоматов сброса газа.
ТЕМА № 12. «СИСТЕМЫ ТОПЛИВОПИТАНИЯ И АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ГТД».
ЗАНЯТИЕ №2. «Двигатель РД-33-2С, как объект автоматического управления. Программа управления двигателем".
Время: 2 часа (групповое занятие)
Цель занятия: Изучить программу управления двигателя РД-33-2С на режимах «М», «ПФ», «МФ», «РПТ», «МГ» и «Крейсерских режимах».
Изучаемые вопросы:
1.Общая характеристика двигателя, как объекта автоматического управления.
2.Программа управления двигателем на режиме «М».
3.Программа управления двигателем на режимах «ПФ», «МФ» и «РПТ».
4.Программа управления двигателем на режимах «МГ» и «Крейсерских режимах».
1.Общая характеристика двигателя, как объекта автоматического управления.
Задачей управления двигателя при изменении условий полёта является обеспечение его оптимальных данных по тяге и экономичности при достаточной газодинамической устойчивости процесса и надёжности конструкции.
Зависимость управляемых параметров (УП) рабочего процесса и управляющих факторов (УФ) от условий полёта при заданном положении РУД носит название программы (закона) управления двигателя.
Управление двигателем может осуществляться:
– Изменением расхода топлива в ОКС GT - используется для регулирования частоты вращения nВД.
– Изменением площади критического сечения сопла FKР - используется для регулирования частоты вращения nнд (или степени понижения давления газа в турбине π*Т).
– Изменение площади выходного сечения FС - используется для регулирования давления газа на срезе реактивного сопла РС из условия обеспечения полного расширения газа в сопле.
– Изменением углов установки лопаток Н.А. φΗА - используется для регулирования КВД из условия обеспечения необходимого запаса газодинамической устойчивости и эффективности компрессора (ΔКУ, η*К и т.д.).
Кроме того, на форсированных режимах изменение расхода топлива в ФКС GTФ используется для регулирования температуры газа в форсажной камере Т*ф.
Параметры GT, FКР, FС, φΗА и GTФ являются управляющимифакторами двигателя.
Параметры nВД, nНД, РС, Т*ф и комплекс параметров компрессора (ΔКУ, η*К и т.д.) являются управляемымипараметрами двигателя.
Распределение УФ между УП можно представить следующим образом:
На двигателе предусмотрено автоматическое ограничение ряда неуправляемых параметров.
Ограничиваются:
– предельное давление воздуха за компрессором Р*Кпред (Р*к пред=3,84МПа=35,5 кг/см2) по условиям прочности корпусов компрессора и камеры сгорания; указанная величина достигается при полёте у земли с большой скоростью в условиях низких температур окружающей среды;
– предельная температура газа за турбиной T*Тпред по условиям прочности элементов турбины;
– минимальный расход топлива в ОКС GTмин в зависимости от давления воздуха Р*в по условиям устойчивости процесса сгорания. В наземных условиях при Т*В≤273К, GTmин =335±20 кг/ч;
– предельная частота вращения РНД nНДпред Ограничение nНД осуществляется в случае раскрутки РНД при отказе системы управления критическим сечением сопла FKР, когда частота вращения выходит из-под контроля регулятора nНД.
Ограничение параметров; Р*к пред, Т*т пред, nНД пред осуществляется воздействием на расход топлива в ОКС.
ОП: Р*к пред, Т*т пред, nНД пред ← GT-
2.Программа управления двигателем на режиме «М».
На «М» режиме в качестве основной осуществляется программа nBД=f1(T*B), nНД=f2(T*B) с коррекцией по Рв.
Как видно из рис. 1 можно выделить три характерных участка программы, определяемых значением Т*в.
2.1 Участок программы при T*В≤288K.
При Т*в<288К реализуется такой закон изменения nBД и nНД по Т*в, при котором обеспечивается неизменность nBД=const и nНД=const. В результате двигатель на этом участке программы работает на подобных режимах, когда все его приведённые параметры (Т*Гпр=Т*Г(288/Т*в), тяга Рпр=Р(1,013х105/Р*в), удельный расход топлива
сохраняются неизменными.
Применение такой программы объясняется следующими причинами.

Поэтому, для сохранения ΔКУ КНД на заданном уровне необходимо при ↓Т*В снижение ↓nНД, сохраняя неизменным nНД npeд=const. Аналогично, при nBД npeд=const обеспечивается и заданное значение ΔКУ КВД. Осуществление этого закона на данном участке программы (при FKР=const) происходит за счёт уменьшения ↓GT в ОКС и соответственно снижения действительных значений nНД, nВД и Т*Г, что также позволяет уменьшить механические и тепловые нагрузки на элементы конструкций без снижения тяги двигателя (при P*B=const) и при улучшении его экономичности ↓Суд (при ↓Т*В). На рис.1 показано предусмотренное программой изменение по Т*В предельно допустимых значений Т*т пред и Т*Г пред·
При Т*В≤288К это изменение соответствует закону Т*Т пр. пред≈1119Κ= const и Т*Г пр пред≈1630К= const. Указанное ограничение предельной температуры на 1-ом участке программы введено на случай отказа регулятора nBД с целью предотвращения чрезмерной раскрутки РВД и снижения, вследствие этого, ΔКУ КВД ниже допустимой величины. При этом одновременно ограничивается и дополнительное расходование ресурса двигателя, связанное с повышением Т*Г и nBД.
2.2 Участок программы при 288К < T*В< 335K.
В диапазоне 288К<Т*В<335К реализуется программа nBД=f1(Т*В), nНД=f2(Т*В). Обеспечивается требуемое ↑Р тяги двигателя с ростом скорости полёта.
На этом участке программы величины nНД и nBД растут по мере ↑Т*В. Рост nBД обеспечивается ростом GT в ОКС и соответствующим Т*Г. Чтобы ↑nНД "затяжеляющегося" вентилятора (КНД), требуется существенное увеличение мощности ТНД. Это достигается путём раскрытия створок реактивного сопла (см. рис. 2), т.е. за счёт увеличения степени расширения газов в ТНД ↑π*ТНД (при этом растёт и π*Т= π*ТВДπ*ТНД).·
При такой программе управления обеспечение требуемой тяги с ростом скорости полёта (↑Т*В) сопровождается увеличением механических (из-за ↑nНД и nBД) и тепловых (из-за ↑Т*Г и Т*ТВД) нагрузок на элементы конструкции двигателя.
В тоже время с ↑Т*В увеличивается и температура воздуха, отбираемого от компрессора на охлаждение нагретых элементов двигателя. Охлаждающие свойства этого воздуха ухудшаются, и эффективность охлаждения снижается, что может привести к недопустимому уменьшению длительности прочности конструкционных материалов (особенно лопаток турбин). Для обеспечения надёжной работы двигателя при высоких значениях Т*В введён участок программы с ограничением роста Т*Г и ↓nBД и nНД.
2.3 Участок программы при T*В_≥ 335K.
При Т*В≥335К реализуется программа:Т*Т пред=const (что соответствует заданному закону изменения Т*Г пред=f3(Т*В) и nHД= f2(T*B).·
В качестве УФ, обеспечивающего Т*т пред=const, используется изменение подачи топлива GT в ОКС. Очевидно, что для ограничения роста Т*Г с ↑T*B>335K, необходимо ↓GT (в сравнении с программой на II участке), а это приводит к некоторому ↓nBД. Одновременно с ограничением Т*Г замедляется рост Т*ТВД перед ТНД. При этом, чтобы исключить опасный рост Т*Г (и Т*ТВД) при отказе ограничителя Т*т npeд; уровень программной настройки nBД на Ill-ем участке программы устанавливается примерно на 2% выше значений nBД=f1(T*B), обеспечиваемых при Т*т=Т*т пред.
Однако, как видно из рис.1 до Т*В=346К программой предусмотрено дальнейшее ↑nНД по тому же закону, что и на II участке. Это обусловлено необходимостью обеспечить заданную тягу на режиме полёта, соответствующем Н=0, Мн=1.
Поскольку при этом рост Т*ТВД замедлен, указанное увеличение обеспечивается за счёт более энергичного ↑π*ТНД (а значит, и π*Т) путём ↑FKР (см. рис.2). При дальнейшем ↑Т*В>346К закон изменения nНД=f2(Т*В) подобран таким образом, чтобы каждому значению nBД соответствовало оптимальное (с точки зрения получения наибольшей тяги) значение nНД .
При условии T*Tnpед=соnst.
Поиск по сайту: