АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Фізичний зміст компонент малої деформації
Для з’ясування фізичного змісту компонент деформації розглянемо декілька практичних випадків.
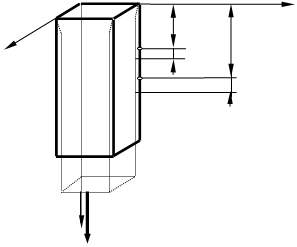
1.4.1 Візьмемо тонкий брусок, який витягнутий вздовж вісі x (дивись рисунок 1.3).
0 z
 |
a
M a+x
y Uox
N
Ux=Uox+ 
x
F
Рисунок 1.3 - Одноосний розтяг бруска вздовж вісі x
На довгому ребрі бруска відмітимо точки M(a) та N(a+x). Якщо розтягувати брусок силою F вздовж вісі x, то компоненти зміщення Uy та U z точки N будуть рівні нулю. Як слідує з рисунка 1.3 та рівняння (1.3) величина
 (1.34)
(1.34)
уявляє відносну зміну розміру тіла (розтяг або стиск) вздовж вісі x. Аналогічно  та
та  - відносні зміни розмірів тіла вздовж відповідно вісей у та z.
- відносні зміни розмірів тіла вздовж відповідно вісей у та z.
1.4.2 Виріжемо в пружному тілі прямокутний паралелепіпед таким чином, щоб він до деформації лежав би на головних вісях деформації 1, 2, 3 та мав ребра довжиною  ,
,  ,
, 
 1
1

 |


Рисунок 1.4 - Об’ємна деформація прямокутного паралелепіпеда
Tоді його об’єм до деформації буде  . Після деформації, коли кінці ребер паралелепіпеда будуть переміщені вздовж головних вісей на
. Після деформації, коли кінці ребер паралелепіпеда будуть переміщені вздовж головних вісей на  , його об’єм буде дорівнювати
, його об’єм буде дорівнювати

(1.35)
Нехтуючи об’ємом відокремлених на рисунку 1.4 брусочків, які є малими другого степеня, та кубічка, об’єм якого є малою величиною третього степеня, тобто відкидаючи добутки коефіцієнтів  з (1.35), отримаємо
з (1.35), отримаємо
 . (1.36)
. (1.36)
Відношення приросту об’єму  до початкового об’єму V називається об’ємною деформацією або дилатацією q. Розкриваючи зміст q, зауважимо, що головні коефіцієнти деформації
до початкового об’єму V називається об’ємною деформацією або дилатацією q. Розкриваючи зміст q, зауважимо, що головні коефіцієнти деформації  є відношення приростків відрізків вздовж вісей 1, 2, 3 до їх початкової довжини.
є відношення приростків відрізків вздовж вісей 1, 2, 3 до їх початкової довжини.
Об’ємну деформацію можна представити інакше. Додамо рівняння (1.28), (1.31), (1.32) та візьмемо до уваги, що

. Тоді отримаємо
 (1.43)
(1.43)
Таким чином, об’ємна деформація (дилатація) рівна дивергенції вектора зміщення  .
.
1.4.3 Виріжемо в пружному тілі тонку пластинку прямокутної форми та розташуємо її в площині xoz (див. рисунок 1.5).
 z
z
x1
Dx F
А В
A/ B/
a
z
0 C
x
x
Рисунок 1.5 – Деформація зсуву
Розміри пластинки до деформації позначимо через x та z. Нижнє ребро пластинки закріплене вздовж вісі x, а до її верхнього ребра по дотичній прикладена сила F паралельно вісі x. Під дією цієї сили пластинка займе нове положення 0A/B/C. За умовами задачі y=y1=0. Оскільки деформація мала, можна рахувати, що величина  при деформації не змінюється, а відносні зміни розмірів вздовж вісі x відсутні. Таким чином, система (1.7) набуває вигляду:
при деформації не змінюється, а відносні зміни розмірів вздовж вісі x відсутні. Таким чином, система (1.7) набуває вигляду:

Звідси

Звертаючись до рисунка 1.5, можна записати
 (1.38)
(1.38)
Аналогічно величина
 , (1.39)
, (1.39)
де  - кут між віссю x та стороною 0С при деформуючій силі, яка скерована вздовж вісі z, якщо пластинка була б закріплена по стороні 0А.
- кут між віссю x та стороною 0С при деформуючій силі, яка скерована вздовж вісі z, якщо пластинка була б закріплена по стороні 0А.
Таким чином величина

 (1.40)
(1.40)
уявляє собою зміну початкового кута між сторонами 0А та 0С після деформації в площині xoz. Так само  та
та  - компоненти деформації зсуву в площинах xoy та yoz.
- компоненти деформації зсуву в площинах xoy та yoz.
Зауважимо, що при деформаціях зсуву об’єм тіла не змінюється, а змінюється лише його форма.
Матриця коефіцієнтів деформації
 (1.40)
(1.40)
називається тензором деформації.
Що таке тензор? Тензор - це сукупність взаємопов’язаних величин. Так три скаляри - координати точки в просторі - утворюють вектор або тензор першого рангу, оскільки вони пов’язані з просторовим розташуванням однієї точки, а інші три скаляри - вага кавуна, розмір взуття бравого солдата Швейка та відстань від Вашого дому до Києва - не утворюють тензора першого рангу, оскільки це не взаємопов’язані величини.
Сукупність взаємопов’язаних векторів утворює тензор другого рангу. Саме таким тензором є матриця (1.41). До речі, вперше поняття тензору було введено саме в теорії пружності, а вже пізніше сформувався окремий розділ математики - тензорний аналіз. В межах даного курсу досить знати дві основні властивості тензору другого рангу:
- тензор вісесиметричний, тобто елементи, які лежать по різні боки від головної діагоналі матриці на рівних відстанях від неї, попарно рівні  ;
;
- слід тензора (або сума компонент, які лежать на головній діагоналі тензора) інваріантний відносно системи координат, тобто її зміна не впливає на його значення.
До властивостей тензорів другого рангу ми повернемось, коли будемо розглядати тензор напруження.
Поиск по сайту: