АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ. «Анализ показателей качества линейных систем автоматического управления»
«Анализ показателей качества линейных систем автоматического управления»
Выполнили: студенты ЭМФ
гр. 3-3 
Либерт Максим Юльевич
Титус Розалия
Проверил: Спичков Юрий Петович
Иваново 2014
Цель работы: экспериментальное исследование переходных процессов в статических и астатических системах автоматического регулирования. Теоретическое и экспериментальное исследование влияния отдельных параметров системы на точность работы системы в статическом и динамическом режимах. Оценка качества исследуемой системы регулирования и определение её оптимальных параметров. Приобретение практических навыков при решении задач синтеза корректирующего устройства системы автоматического регулирования.
Объект управления представлен передаточной функцией вида:
 – передаточная функция управляющего устройства. В качестве управляющего устройства используются пропорционально-интегральный (ПИ) или интегральный (И) регуляторы.
– передаточная функция управляющего устройства. В качестве управляющего устройства используются пропорционально-интегральный (ПИ) или интегральный (И) регуляторы.
Передаточная функция интегрального регулятора  , где
, где  - постоянная времени интегрирования.
- постоянная времени интегрирования.
Пропорционально-интегральный регулятор представлен передаточной функцией вида  , где
, где  пропорциональная составляющая регулятора.
пропорциональная составляющая регулятора.
Исходные данные:  ;
; 
 .
.
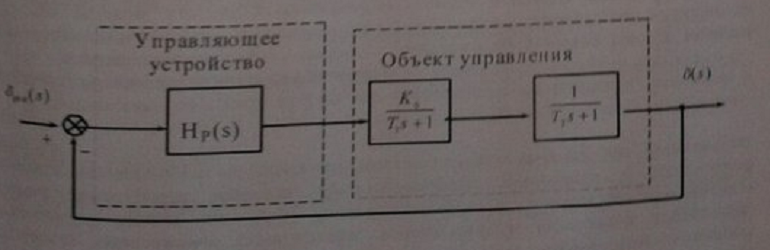
Структурная схема системы имеет вид:
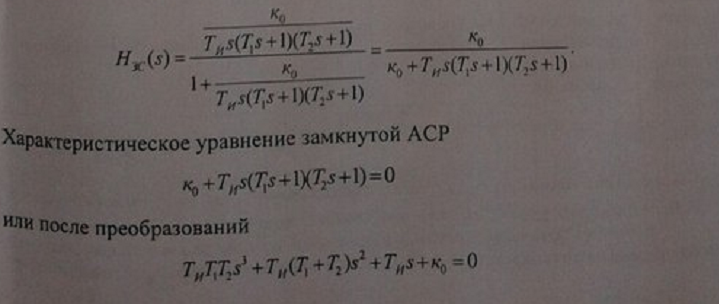
Модель исследуемой системы:

1. Определение границы изменения постоянной времени  ПИ – регулятора из условия устойчивости
ПИ – регулятора из условия устойчивости
Границу изменения постоянной  регулятора при фиксированных значениях параметров АСР определим используя алгебраический критерий устойчивости Гурвица.
регулятора при фиксированных значениях параметров АСР определим используя алгебраический критерий устойчивости Гурвица.
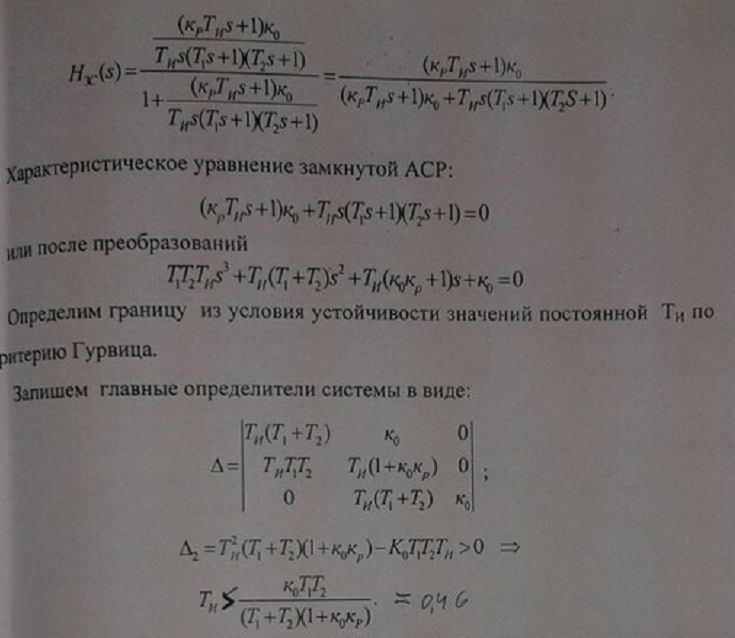
 ,89
,89
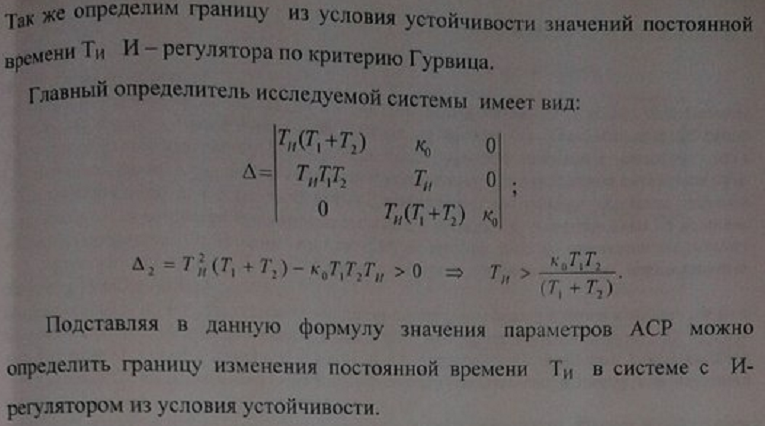
2. Определение границы изменения постоянной времени И – регулятора из условия устойчивости

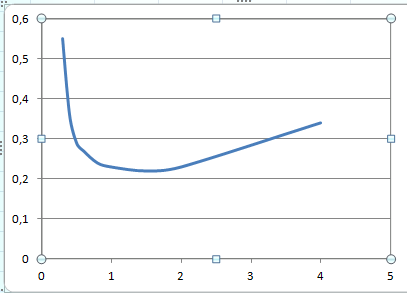
3. Определение значения постоянной времени И – регулятора, соответствующей минимальному значению интегрально оценки
Расчётное значение величины постоянной времени  ПИ – регулятора:
ПИ – регулятора:

Таблица № 1. Результаты определения значений квадратичной оценки в системе регулирования
с ПИ – регулятором
| № эксперимента | |||||||||

| 0,5 | 2,5 | 3,2 | 3,56 | 3,7 | ||||

| 0,27 | 0,23 | 0,22 | 0,22 | 0,23 | 0,24 | 0,24 | 0,25 | 0,29 |

Расчётное значение величины постоянной времени И – регулятора:

Таблица № 2. Результаты определения значений квадратичной оценки в системе регулирования с И – регулятором
| № эксперимента | ||||||||||
|
| 0,25 | 0,3 | 0,4 | 0,5 | 0,6 | 0,8 | 1,5 | |||
|
| 0,57 | 0,55 | 0,36 | 0,29 | 0,27 | 0,24 | 0,23 | 0,22 | 0,23 | 0,24 |
Вывод: в данной работе были произведены исследования экспериментальное исследование переходных процессов в статических, астатических САР и оценка качества исследуемой системы регулирования.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Поиск по сайту: