АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Индукционные преобразователи
Индукционными называются преобразователи, в которых скорость
изменения измеряемой механической величины преобразуется в индук-
тированную ЭДС. Индуктированная ЭДС определяется скоростью изме-
нения магнитного потока Ф, сцепленного с катушкой из W витков:
Следовательно, индукционные преобразователи возможно приме-
нять для измерения линейных и угловых перемещений.
Существует две группы индукционных преобразователей:
с неизменным сопротивлением на пути постоянного магнитного по-
тока. В преобразователях подобного типа ЭДС в катушке наводится бла-
годаря линейным (рис. 2.6,а) или угловым (рис. 2.6,б) перемещениям ка-
тушки;
с сопротивлением на пути постоянного магнитного потока, которое
изменяется под действием преобразователей измеряемой величины.

Рис. 2.6. Принцип устройства индукционных преобразователей: а – с подвижной катушкой, совершающей линейное перемещение; б – с подвижной катушкой, совершающей угловое перемещение.
Схема устройства такого преобразователя изображена на рис. 2.7. На
валу укреплен стальной зуб М. При вращении вала этот зуб проходит
мимо зазора неподвижно установленной магнитной системы с постоян-
ным магнитом, уменьшая сопротивление зазора так, как показано на кри-
вой RМ. При этом в катушке, надетой на магнит, наводятся импульсы
ЭДС, форма которых показана на кривой е. Частота импульсов, выра-
женная в герцах, всегда будет в точности равна скорости вращения вала,
выраженной в числе оборотов в секунду.
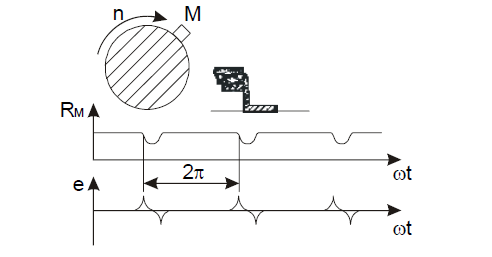
Рис. 2.7. Принцип действия простейшего датчика тахометра с индукционным преобразователем
Наиболее широкое распространение получили преобразователи пер-
вой группы в приборах для измерения: скорости вращения (тахометры),
ускорения, расходов жидкостей и параметров вибрации.
Индукционный тахометр с вращающимся магнитным полем –
простейший показывающий прибор для измерения скорости вращения.
Конструкция тахометра изображена на рис. 2.8. Постоянный магнит А с
помощью гибкого валика приводится во вращение устройством, скорость
вращения которого необходимо определить. В соответствии с располо-
жением магнита установлен алюминиевый диск 1. На валу диска 2 име-
ется противодействующая пружина 3. При вращении магнита А магнит-
ный поток Ф пересекает диск и наводит в нем вихревые токи, которые,
взаимодействуя с потоком Ф, создают вращающий момент Мip, закручи-
вающий пружину 3. При этом угол отклонений стрелки 4, укрепленной на
валу прибора, пропорционален скорости вращения п приводного валика:

Рис. 2.8. Принцип устройства тахометра с вращающимся магнитным полем
Индукционный расходомер служит для измерения расхода элек-
тропроводной жидкости. Его устройство можно уяснить из схемы, пока-
занной на рис. 2.9.

Рис. 2.9. Схема устройства индукционного расходомера
Между полюсами электромагнита 2 и 3 помещена труба 1 из немаг-
нитного материала с площадью поперечного сечения S. Внутри трубы со
скоростью υ протекает электропроводная жидкость, расход которой не-
обходимо замерить. В трубе вмонтированы электроды 4 и 5, включенные
в цепь усилителя. На выходе усилителя имеется электроизмерительный
прибор Уk, проградуированный в единицах расхода жидкости. ЭДС, воз-
никающая между электродами, пропорциональна количеству жидкости,
перекачиваемой через поперечное сечение трубы в зоне электродов:
E = kQ.
Компенсационное сопротивление Rk необходимо в измерительной
цепи для создания падения напряжения, компенсирующего трансформа-
торную ЭДС EТ, которая возникает между электродами 4 и 5 при пересе-
чении их переменным потоком силового поля электромагнита. Погреш-
ность такого прибора лежит в пределах 1,0 – 2,5%.
Основными преимуществами индукционных расходомеров по срав-
нению с механическими является их безынерционность, независимость
показаний от характеристик жидкости (плотности, вязкости) и отсутствие
перепада давлений до и после счетного механизма.
Поиск по сайту: