АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Асинхронные машины
1. Работа асинхронной машины в генераторном режиме (механическая характеристика, энергетическая диаграмма).
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим. При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение  .
.
Для работы асинхронной машины в генераторном режиме требуется источник реактивной мощности, создающий магнитное поле. При отсутствии первоначального магнитного поля в обмотке статора поток создают с помощью постоянных магнитов, либо при активной нагрузке за счёт остаточной индукции машины и конденсаторов, параллельно подключенных к фазам обмотки статора.
Асинхронный генератор потребляет реактивный ток и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов,батарей статических конденсаторов (БСК). Из-за этого, несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном в качестве ветрогенераторов малой мощности, вспомогательных источников небольшой мощности и тормозных устройств. Зато генераторный режим асинхронного двигателя используется довольно часто. В таком режиме работают двигатели эскалаторов метро, которые едут вниз. В генераторном режиме работают двигатели лифтов, в зависимости от соотношения веса в кабине и в противовесе.
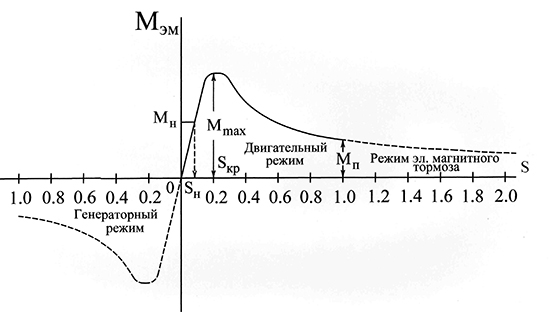
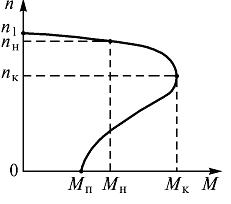
Рис. 1 - Механическая характеристика асинхронной машины
Преобразование энергии и потери в АД наглядно иллюстрирует энергетическая диаграмма, которая изображается в виде потока энергии с ответвлениями, символизирующими те или иные потери (рис. 1).
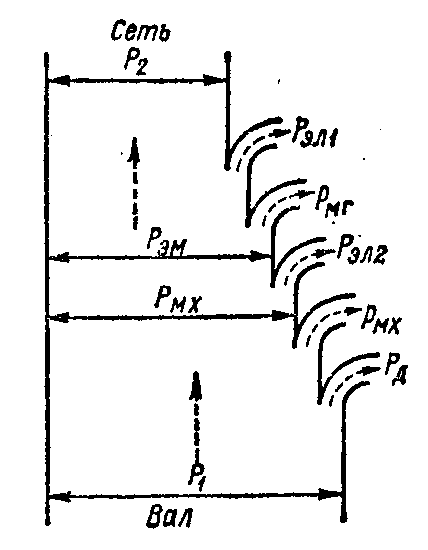
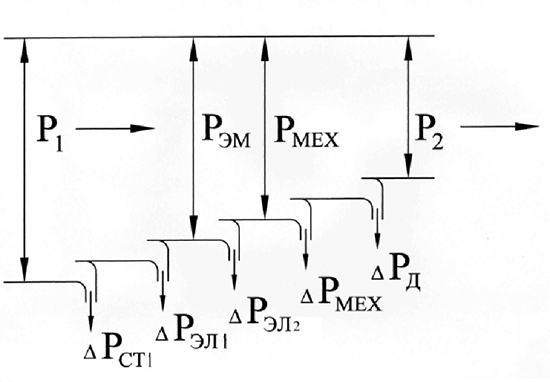
Рис. 1 - Энергетическая диаграмма асинхронного двигателя в двигательном режиме
АД потребляет из сети мощность:

Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора на гистерезис и вихревые токи:

Поскольку в рабочем режиме частота перемагничивания ротора мала, то потерями в стали ротора обычно пренебрегают. Кроме того, необходимо учитывать электрические потери в обмотке статора, которые равны:
Оставшаяся часть мощности передается через воздушный зазор в ротор электромагнитным путем и поэтому называется электромагнитной мощностью:

На основании схемы замещения приведенного АД электромагнитная мощность, передаваемая в ротор, может быть записана выражением:
или
Часть электромагнитной мощности расходуется в виде электрических потерь в обмотке ротора:
Исходя из формулы Pэм, эти потери могут быть записаны также через мощность Рэм и скольжение s:
т.е. электрические потери в обмотке ротора пропорциональны скольжению.
Оставшаяся часть электромагнитной мощности преобразуется в механическую мощность АД:

Полезная механическая мощность на валу АД меньше мощности Рмех на величину механических:

и добавочных

потерь:

Механические потери обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе магнитных полей рассеяния и полей высших гармоник.
Коэффициент полезного действия определяется отношением полезной мощности на валу к мощности, потребляемой им из сети, т.е.:
где

2. Работа асинхронной машины в двигательном режиме (механическая характеристика, энергетическая диаграмма).
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в обмотке ротора возникает ток. На проводники с током этой обмотки (а точнее, на зубцы сердечника ротора), действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор вслед за магнитным полем. Если этот момент достаточен для преодоления сил трения, ротор приходит во вращение, и его установившаяся частота вращения  [об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках, вентиляцией и т. д. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать вращающий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
[об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках, вентиляцией и т. д. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать вращающий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
 .
.
Относительная разность частот вращения магнитного поля и ротора называется скольжением:
 .
.
Очевидно, что при двигательном режиме  .
.
3. Объясните зависимость к.п.д. от нагрузки. При каких условиях к.п.д. достигает максимального значения?
Зависимость КПД от полезной мощности выражается типичной кривой, выходящей из начала координат и достигающей максимума примерно при 80 %-и нагрузке, а затем постепенно КПД уменьшается. Номинальное значение КПД асинхронных двигателей составляет величину в пределах 80-94 %. Большие значения КПД - у двигателей большой мощности. КПД короткозамкнутых двигателей несколько выше, чем фазных.


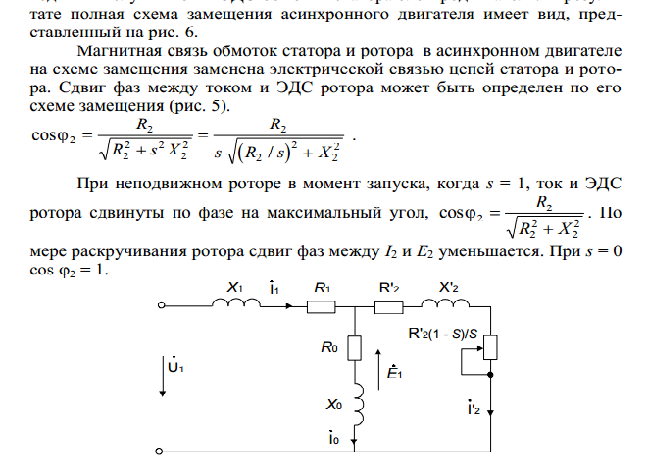
4. Изменяется ли угол сдвига фазы между током и э.д.с. в обмотке ротора при изменении скольжения от 1 до 0? Поясните почему.
5. Как изменится магнитный поток асинхронного двигателя при увеличении частоты питающей сети при постоянном напряжении? Приведите обоснование.
Ф m = U 1 /(4,44f 1 w 1 k o61 ).
6. Почему вращающий момент асинхронного двигателя растет относительно быстрее, чем возрастает мощность на валу?

7. Почему при введении активного сопротивления в цепь обмотки ротора пусковой ток уменьшается, а пусковой момент увеличивается?





8. Что такое намагничивающий ток асинхронной машины? Где он протекает на схеме замещения и в реальной машине?
Намагничивающий ток I μ является главной составляющей тока холостого хода трансформатора I 0. Этот ток является реактивным, т.е., Iμ = I 0p. Однако реальный трансформатор в режиме холостого хода потребляет от источника переменного тока некоторую активную мощность, так как при переменном магнитном потоке в стальном магнитопроводе возникают потери энергии от гистерезиса и вихревых токов (магнитные потери ΔPм). Поэтому ток холостого хода I 0 должен иметь еще и активную составляющую 10a = ΔPм/U1, которая обеспечивает поступление в первичную обмотку мощности, компенсирующей магнитные потери (электрическими потерями в первичной обмотке в этом режиме можно пренебречь из-за малости тока холостого хода).
Следовательно, ток холостого хода
| Í 0 = Í μ + Í 0a | или |
| (2.19) |
Обычно при выполнении магнитопровода трансформатора из листовой электротехнической стали толщиной 0,28—0,50 мм и частоте 50 Гц активная составляющая тока I0а не превышает 10% от тока I 0, поэтому она оказывает весьма малое влияние на значение тока холостого хода (изменяет его не более чем на 1%). Форма кривой тока холостого хода определяется в основном кривой намагничивающего тока.
9. Напряжение на зажимах асинхронного двигателя уменьшили в два раза. Как изменится его максимальный момент?
| M кр= C м | U 12 | ; S кр≈ | R 2 | . |
| 2 X 2 | X 2 |
Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U 1 снижается перегрузочная способность асинхронного двигателя.
10. Изобразите векторную диаграмму асинхронной машины в двигательном режиме. Объясните порядок построения.
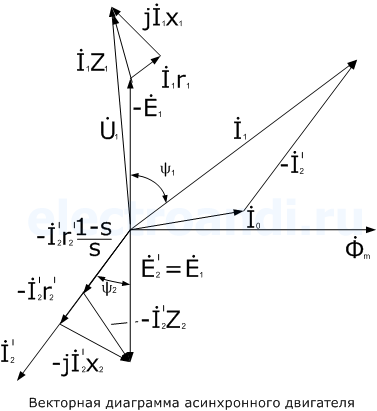
Построение векторной диаграммы начинается с вектора основного магнитного потока Ф. Затем откладываются вектора E2’ и E1, которые отстают от вектора Ф на 90⁰. Затем зная угол сдвига фаз ψ2 между I2’ и E2’, строят вектор I2’. Вектор I0 опережает Ф на угол δ, а вектор I1 находят как векторную сумму I0 и -I2’. Вектор U1 строим, добавляя к вектору –E1 падение напряжения I1r1параллельно вектору I1, затем откладываем jI1x1 и получаем вектор I1Z1, который складываем с –E1 и в итоге получаем U1.
Так как асинхронный двигатель в данном случае можно рассматривать как трансформатор, работающий на активную нагрузку, то вектор –I2’r2’(1-s)/s откладываем под тем же углом, что и I2', затем прибавляем к нему –I2’r2’ и –jI2’x2, получаем вектор –I2’Z2.
11. Где больше магнитные потери - в неподвижном статоре или во вращающемся роторе, почему?
Протекающий по обмоткам ток вызывает нагрев этих обмоток, поэтому забираемся из сети мощность частично теряется в обмотке статора в виде электрических потерь
 . (8.2)
. (8.2)
Перемагничивание сердечника статора сопровождается магнитными потерями  ; эти потери в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи.
; эти потери в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи.
Оставшаяся часть мощности представляет собой электромагнитную мощность  , передаваемую со статора на ротор
, передаваемую со статора на ротор
 . (8.3)
. (8.3)
Этой мощности соответствует электрическая мощность в сопротивлении  , т. е.
, т. е.
 . (8.4)
. (8.4)
Часть этой мощности теряется в виде электрических потерь в обмотке ротора
 . (8.5)
. (8.5)
Частота перемагничивания сердечника ротора  . При частоте тока в сети
. При частоте тока в сети  и номинальном скольжении
и номинальном скольжении  частота перемагничивания ротора
частота перемагничивания ротора  , поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают,
, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают,  .
.
За исключение электрических потерь в обмотке ротора, электромагнитная мощность переходит вмеханическую
 , (8.6)
, (8.6)
где сопротивление  вводится в цепь ротора для замены механической мощности при вращающемся роторе на электрическую мощность при неподвижном роторе. Электрические потери в обмотке ротора можно выразить
вводится в цепь ротора для замены механической мощности при вращающемся роторе на электрическую мощность при неподвижном роторе. Электрические потери в обмотке ротора можно выразить
 .
.
12. Назовите и объясните конструктивные меры улучшения формы кривой э.д.с. трехфазной обмотки.
Укорочение шага обмотки, распределение обмотки по пазам, скос пазов обмотки.
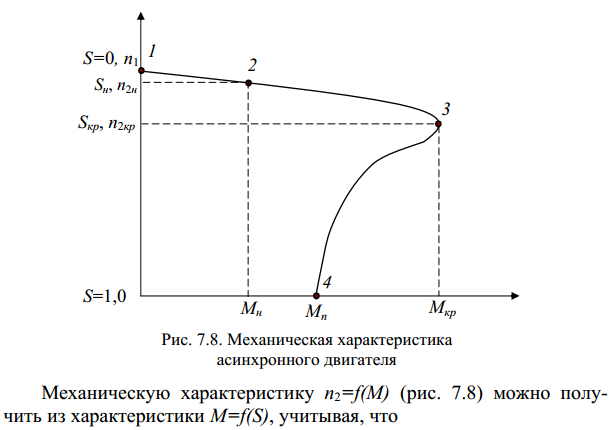
13. Изобразите механическую характеристику асинхронной машины. Укажите скорости и скольжения в различных режимах работы.
14. В чем различия с энергетической точки зрения между генераторным и двигательным режимом работы асинхронной машины? Сравните энергетические диаграммы.
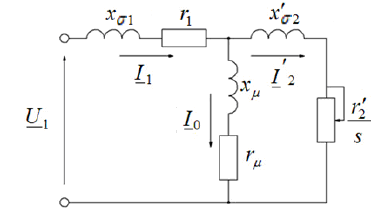
15. Схема замещения асинхронной машины, физический смысл ее параметров.
r1, xσ1 - активное сопротивление и индуктивное сопротивление рассеяния статорной обмотки; rʹ2, xʹσ2 - приведенные к статорной обмотке активное сопротивление и индуктивное сопротивление рассеяния роторной обмотки; rμ, xμ – активное и индуктивное сопротивления намагничивающего контура.
16. От чего зависит величина, форма кривой и частота э.д.с. обмотки машин переменного тока.
Переменная э. д. с, индуктируемая в обмотке машины перемен-•ного тока, характеризуется величиной, частотой и формой кривой. Практикой установлено, что энергосистемы лучше всего работают при синусоидальной форме кривой э. д. с, так как при кривой, отличающейся от синусоиды, в ней содержатся высшие гармонические, которые оказывают вредное влияние не только на генератор, но и на линии передачи и на большую часть потребителей электроэнергии. В генераторах и двигателях высшие гармонические составляющие вызывают увеличение потерь и нагревание машин, в линиях электропередачи они могут способствовать возникновению перенапряжений, а также оказывают влияние на близлежащие линии связи.
Кривая э. д. с. характеризуется коэффициентом формы кривой
кфЕ/Е,,, (18.1)
где / Ti т/2
17. Почему асинхронный генератор не получил широкого распространения?
Для того чтобы создавать вращающееся магнитное поле, генератору требуется реактивная энергия, которую он потребляет из сети, то есть должно происходить возбуждение. Без возбуждения работа генератора невозможна. Именно по этой причине, асинхронный генератор не получил широкого распространения.
18. Как зависит электромагнитный момент АМ от напряжения, частоты питающей сети, реактивностей статора и ротора?
от напряжения электромагнитный момент зависит квадратично, от частоты прямо пропорционально, от реактивностей: в частности от индуктивности прямо пропорционально а и от емкости обратно пропорционально
19. Почему потери в стали ротора АМ практически можно считать равными нулю?
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание. Это объясняется тем, что скорость вращения магнитного потока относительно статора n0 во много раз больше скорости вращения магнитного потока относительно ротора n0 - n, если скорость вращения ротора асинхронного двигателя n соответствует устойчивой части естественной механической характеристики.
20. Почему АД не приходит во вращение, если в сеть включена только одна фаза двигателя?
21. Нарисуйте механическую характеристику асинхронной машины. Покажите на ней номинальный и пусковой момент.
22. С какой целью проводится опыт ХХ асинхронного двигателя? Приведите и поясните характеристики холостого хода.
23. Укажите факторы, ограничивающие применение прямого пуска асинхронных двигателей.
Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском Этот способ отличается простотой, имеет недостатки. В момент непосредственного подключения обмоток статора к сети в обмотке возникает большой пусковой ток,. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмоток статора.
Но частый пуск приводит к возрастанию перегрева обмоток, нагреву и старению изоляции.
24. Как повлияет на механическую характеристику включение АМ, рассчитанной на 50 Гц, в сеть с частотой 60 Гц.
25. С какой целью и как проводится опыт КЗ асинхронного двигателя? Приведите и поясните характеристики короткого замыкания.
26. В каких участках стали возникают потери в АД при неподвижном роторе, при синхронном вращении, при номинальной нагрузке?
В любом случае потери в стали это потери на перемегничивание, потери на токи Фуко и потери на поля рассеяния. Потери на перемегничивание возрастают при режиме КЗ (неподвижный ротор), так как железо входит в состояние насыщения, или близко к этому. Потери на токи Фуко - являются постоянными, завися от проводимости стали, от степени шихтованности железа и качества изоляции пластин. Поля рассеяния при синхронном вращении меньше, чем при режиме КЗ.
П. С. При номинальной частоте вращения потери в стали будут минимальны.
27. Почему ротор асинхронного двигателя не может вращаться со скоростью поля статора?
Если подключить обработку статора к сети трехфазного переменного тока, то внутри статора возникает вращающееся магнитное поле. Магнитные линии поля будут пересекать обмотку неподвижного тока ротора и индуктировать в ней ЭДС. Ротор при своем вращении не может догнать вращающееся магнитное поле статора. Если предположить, что ротор будет иметь такую же скорость вращения, как и магнитное поле статора, то токи в обмотке ротора исчезнут. С исчезновением токов в обмотке ротора прекратится взаимодействие их с полем статора и ротор станет вращаться медленнее вращающегося поля статора. Однако при этом обмотка ротора вновь начнет пересекаться вращающимся полем статора и на ротор снова будет воздействовать вращающий момент. Следовательно, ротор при своем вращении всегда должен отставать от скорости вращения магнитного поля статора, т. е. вращаться асинхронно (не в такт с магнитным полем), почему эти двигатели и получили название асинхронных.
Поиск по сайту: