АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
ТЕМА № 14. «ПУСКОВЫЕ СИСТЕМЫ ГТД. ВХОДНЫЕ УСТРОЙСТВА ГТД. ПРОВЕРКА ПАРАМЕТРОВ ГТД, И РАБОТЫ СИСТЕМ САМОЛЕТА»
Система автоматического регулирования воздухозаборника АРВ-29, предназначенадля управления клином воздухозаборника самолёта МиГ-29 с двигателем РД-33-2С на режимах:
- автоматического программного регулирования в зависимости от приведенного числа оборотов двигателя с коррекциями:
– по углу стабилизации φ1 - φ3;
– по сигналу включения и отключения форсажа "Ф";
– по сигналу клапана стравливания "КС" и сигналу помпажа "Рст";
- автоматического регулирования, в зависимости от положения клина смежного воздухозаборника;
- ручного управления от задатчика ИГЖ-2-046 (режим используется для наземных отработок системы на двигателе);
- установки клина во взлетно-посадочное положение;
-аварийной уборки клина.
Принцип действия системы АРВ.
На основных режимах работы (включая взлет, посадку и аварийные режимы) система представляет собой автоматический регулятор, осуществляющий управление положением клина сверхзвукового воздухозаборника по одному из двух каналов:
- основному, LКЛ= f (nnp), в зависимости от внешних электрических сигналов, пропорциональных Тн* и nфиз;
- резервному, включающему в себя дублирующее управление Lкл=f(Lкл.см.) и ручное управление Lкл=f(αзру).
Во всех трех режимах управления (основной автоматический, дублирующий автоматический и ручной) для реализации требуемой зависимости между задающим(управляющим) воздействием nпр, Lкл.см. или αзру и регулируемой величиной(положение клина) Lкл. используется принцип обратной связи, который заключается в сравнении требуемого значения регулируемой величины, определяемого задающим воздействием, с его фактическим значением. При несоответствии требуемого значения положения клина фактическому, возникает сигнал ошибки (рассогласования), который за счет соответствующих источников энергии (бортсеть электрическая и гидравлическая) создает с помощью агрегата управления" АУ 46-01 и силового гидроцилиндра механическое воздействие на объект регулирования (клин воздухозаборника) и перемещает его в положение, при котором несоответствие заданного и фактического значения Lкл становится малой (допустимой) величиной определяемой статической точностью системы.
Комплектность системы.
На самолёте имеются два раздельных воздухозаборника, управляемые двумя самостоятельными системами.
В комплект системы входят:
– блок автоматики БА-345 -1 шт.;
– датчик температуры ДТ-205 -1 шт.;
– индикатор положения клиньев воздухозаборника ИПК-2-046 с блоком усилителей БУ-8 - 1 шт. на две системы;
– агрегат управления АУ 46-01 -1 шт;
– датчик обратной связи ДОС-228 - 1 шт.
ТЕМА № 14. «ПУСКОВЫЕ СИСТЕМЫ ГТД. ВХОДНЫЕ УСТРОЙСТВА ГТД. ПРОВЕРКА ПАРАМЕТРОВ ГТД, И РАБОТЫ СИСТЕМ САМОЛЕТА».
ЗАНЯТИЕ №4. «Автоматическая система управления воздухозаборником самолета МиГ-29».
Время: 2 часа (групповое занятие)
Цель занятия: Изучить работу и эксплуатацию автоматической системы управления СВЗ самолета МиГ-29
Изучаемые вопросы:
1.Работа автоматической системы управления СВЗ самолета МиГ-29.
2.Эксплуатация автоматической системы управления СВЗ самолета МиГ-29.
1.Работа автоматической системы управления СВЗ самолета МиГ-29.
1.1. Порядок работы системы на самолёте.
Клин воздухозаборника самолёта МиГ-29, регулирующий поступление воздуха в двигатель, представляет собой разъемную конструкцию и состоит из двух панелей - задней и передней. Специальным электрогидравлическим распределителем "сцепки-расцепки" обе панели либо сцеплены и работают как единое целое (клин) в режиме автоматического регулирования подачей воздуха в двигатель, либо расцеплены (режим взлета и посадки). При этом задняя панель сцеплена с 
 фюзеляжем, а передняя панель может занимать как убранное, так и полностью выпущенное положение, перекрывая осевой вход доступа воздуха в двигатель. Забор воздуха в двигатель осуществляется двумя путями: либо через осевой, либо через верхний входы воздухозаборника.
фюзеляжем, а передняя панель может занимать как убранное, так и полностью выпущенное положение, перекрывая осевой вход доступа воздуха в двигатель. Забор воздуха в двигатель осуществляется двумя путями: либо через осевой, либо через верхний входы воздухозаборника.
На земле - панели клиньев воздухозаборников расцеплены и передние панели полностью убраны, осевой вход открыт. При этом створки верхнего входа жестко зафиксированы в закрытом положении.
После запуска двигателей - по сигналу "РУД ≥ МГ" одного любого из двигателей, при наличии давления в основной гидросистеме самолёта, происходит расфиксация створок верхнего входа обоих воздухозаборников Фиксация и расфиксация створок верхнего входа обоих воздухозаборников осуществляется одним электрогидравлическим распределителем.
При поступлении в систему сигналов расфиксациистворок верхнего входа своего воздухозаборника и сигнала "РУД ≥ МГ" своего двигателя, передняя панель клина занимает полностью выпущенное взлетно-посадочное положение ("ВП"). Осевой вход - закрыт, верхний вход - открыт.
Дальнейшее открытие осевого входа и управление клином воздухозаборника на двигателе происходит в следующей последовательности:
- при достижении приборной скорости "Vпр" ≥ 200 км/ч происходит уборка передней панели клина, открытие осевого входа (от электрогидравлического распределителя, осуществляющего выпуск или уборку клина);
- по сигналам "Vпр" и "ПУ" (передняя панель убрана) происходит механическая сцепка передней и задней панелей клиньев (от электрогидравлического распределителя, осуществляющего сцепку или расцепку передней и задней панелей);
- переход системы на режим автоматического управления клином (от агрегата управления АУ46-01) происходит по сигналу срабатывания сигнализатора СЧМ-1-0,85 при поступлении в систему сигналов "Сцепка" (от концевого выключателя сцепленного положения клина) и убранного положения левой стойки шасси (сигнал выдается с концевого выключателя положения левой стойки шасси).
При неисправности в работе системы, если после уборки шасси передняя панель клика не откроет осевой вход (отсутствует сигнал "Сцепка") в кабине самолета на лицевой панели системы "Экран" высвечивается сигнал "Верхний вход", запрещающийпродолжение полёта самолёта и сопровождающийся речевой информацией.
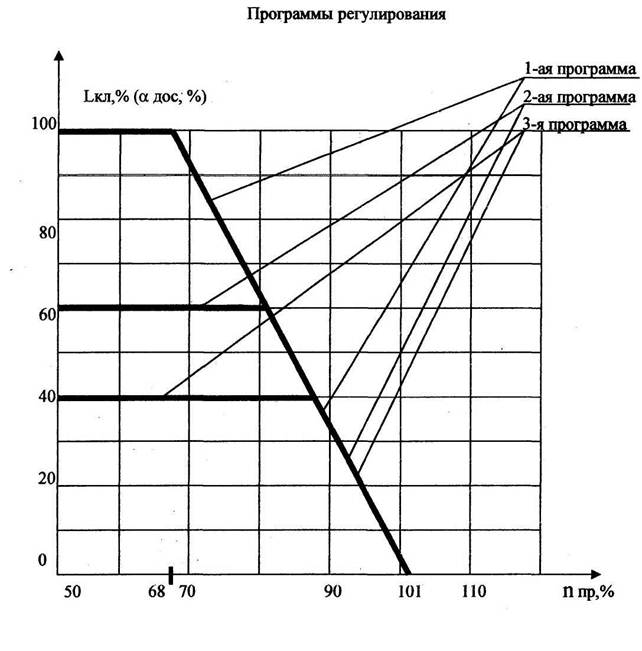
На автоматическом режиме работы управление клиньями ведется по трем программам регулирования:
- По 3-ей программе регулирования - при наличии сигнала Μ ≥ Ml. при условии Η ≤ Η срабатывания по сигналу nпр. < 95 % (где М1=1,15; Нср≈3000м.)  .
.
- По 2-ой программе регулирования - при наличии сигналов Μ ≥ Ml и Η ≥Нср.
- По 1-ой программе регулирования - при наличии сигналов Μ ≥ М2 и Η ≥ Ηср. (где М2=1,5).
Система имеет резервный канал управления, который, как и основной канал, управляет клином от агрегата управления АУ46-01.
На резервном канале обеспечивается:
– дублирующее управление клином по команде из кабины объекта "Дубл. упр.", при этом клин вместо сигнала nпр отслеживает положение клина смежного воздухозаборника, работающего на основном канале регулирования;
– ручное управление по сигналу с пульта ПНП-129 "Ручное" от задатчика ручного управления ИПК-2-046 (ручной режим предназначен для наземных отработок системы и в реальной работе не используется).
В системе АРВ предусмотрена возможность аварийной уборки клина воздухозаборника по команде из кабины самолёта от электрогидравличсекого распределителя ("Выпуска - уборки") при наличии давления в гидросистеме объекта. При отсутствии давления в гидросистеме самолёта аварийная уборка клина обеспечивается схемой самолёта и производится от клапана типа МКТ. Система выдает сигнал "Возд заб. лев. (прав.) включи Дубл. упр.", означающий "Отказ АРВ", в кабину объекта на систему "Экран" и стопорит клин в текущем положении в следующих случаях:
при исчезновении питания на выходе источника питания в блоке БА-245;
при превышении положения клина Lкл. ≥ 55 % при условиях Μ < "ΜΙ" или Η < "Hсp". Появление на лицевой панели системы "Экран" сигнала, означающего "Отказ АРВ", может быть вызвано залипанием или несрабатыванием одного из концевых выключателей расфиксации створок верхнего входа.
На торможении при отускании сигнализатора СЧМ-1-0,85 клинья полностью убираются, в систему поступает сигнал "ПУ". В дальнейшем после выпуска шасси расцепка передней и задней панелей производится по снятию с системы сигнала "V пр." = 200 км/ч (при наличии сигнала "ПУ").
После процесса расцепки панелей по сигналу концевого выключателя "Расцепка" передняя панель клина переходит в полностью выпущенное положение "ΒП", - осевой вход воздухозаборника закрыт.
При установке РУД в положение "Стоп" передняя панель соответствующего воздухозаборника занимает убранное положение. После установки обоих РУДов в положение "Стоп" и перехода передних панелей клиньев  в положение LклI<55 %, створки верхнего входа обоих воздухозаборников жестко фиксируются в закрытом положении специальным механизмом "фиксации - расфиксации". Осевые входы открыты для осмотра и работ в каналах воздухозаборников.
в положение LклI<55 %, створки верхнего входа обоих воздухозаборников жестко фиксируются в закрытом положении специальным механизмом "фиксации - расфиксации". Осевые входы открыты для осмотра и работ в каналах воздухозаборников.
В системе АРВ предусмотрена встроенная система контроля (ВСК), обеспечивающая в наземном режиме работы при расцепленном клине проверку работоспособности электрической части системы с индикацией на лампу "Контроль входа" в кабине самолета.
2.Эксплуатация автоматической системы управления СВЗ самолета МиГ-29.
Блоки и агрегаты системы предназначены:
ДЧВ-2500 - датчик частоты вращения - для пропорционального преобразования скорости вращения вала вентилятора двигателя в электрические сигналы (частоту), поступающие в систему по двум электрически не связанным цепям.
ДТ-205 датчик температуры - для измерения температуры заторможенного потока воздуха.
БА-245 - блок автоматики - для преобразования сигналов, поступающих с датчика частоты вращения, датчика температуры, датчика обратной связи и команд с борта самолета в сигналы управления.
Сигналы управления поступают:
– в обмотки управления АУ 46-01;
– в обмотки электрогидравлического распределителя выпуска-уборки;
– в обмотки электрогидравлического распределителя сцепки-расцепки.
Кроме того, блок БА =245 выдает:
– в блок автоматики предупреждающих сигналов (БАПС) сигнал "Контроль входа";
– в систему "Экран" сигнал "Отказ";
– в блок автоматики БА-245 смежной системы сигнал "Отказ", сигнал "Дублирующее управление включено" и непрерывный сигнал, пропорциональный положению клина воздухозаборника.
– АУ46-01 - агрегат управления регулирует расход рабочей жидкости, поступающей от гидросистемы самолёта к гидроцилиндру управления клином воздухозаборника.
– ДОС-228 - датчик обратной связи - для выдачи электрических сигналов, пропорциональных положению клина воздухозаборника, в блок автоматики БА-245 и индикатор ИПК-2-046.
– ИПК-2-046, БУ-8 - индикатор положения клиньев и блок усилителей для индикации положения клиньев воздухозаборника при работе системы на основном или дублирующем канале и для управления клиньями воздухозаборника при работе в режиме ручного управления.
Система АРВ взаимодействует со следующими агрегатами:
- силовым гидроцилиндром управления клином воздухозаборника - 1шт.
- электрогидравлическими распределителями - 2 шт.
Размещение блоков и агрегатов системы АРВ-29:
– блок автоматики БА-245, агрегат управления - АУ 46-01, датчик обратной связи ДОС-228 и блок усилителей БУ-8 - на фюзеляже;
– индикатор положения клиньев ИПК-2-046 - в кабине;
– датчик частоты вращения ДЧВ-2500 - на двигателе;
– датчик температуры ДТ-205 - в воздухозаборнике.
Поиск по сайту: