АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Путь и перемещение при криволинейном движении

Путь и перемещение.
При криволинейном движении путь всегда больше перемещения
Отличие пути и перемещения
1. Путь - скалярная величина и характеризуется только числовым значением.
2. Перемещение - векторная величина, характеризуется как числовым значением (модулем), так и направлением.
3. При движении тела путь может только увеличиваться, а модуль перемещения может как увеличиваться, так и уменьшаться.
4. Если тело вернулось в начальную точку, его перемещение равно нулю, а путь нулю не равен.
Путь s - скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s> 0.
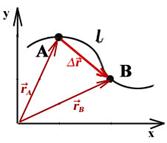
Перемещение тела за определенный промежуток времени - направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела.
(см. рис. 2): 
 ,
,
где  и
и  — радиус-векторы тела в эти моменты времени.
— радиус-векторы тела в эти моменты времени.
Проекция перемещения на ось Ох: ∆rx =∆х = х-х0, где x0 и x - координаты тела в начальный и конечный моменты времени.
Модуль перемещения не может быть больше пути:  ≤s.
≤s.
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:


№5 Движение точки по окружности
Движение точки по окружности может быть очень сложным (рис. 17).
Рассмотрим подробно движение точки по окружности, при котором v = const. Такое движение называется равномерным движением по окружности. Естественно, вектор скорости не может быть неизменным (v не равно const), так как направление скорости постоянно меняется.
Время, за которое траектория точки опишет окружность, называется периодом обращения точки (Т). Число оборотов точки в одну секунду называется частотой обращения (v). Период обращения можно найти по формуле:


Естественно, перемещение точки за один оборот будет равно нулю. Однако пройденный путь будет равен 2ПиR, а при числе оборотов п путь будет равен 2ПиRn или 2ПиRt/T, где t - время движения.
Ускорение при равномерном движении точки по окружности направлено к ее центру и численно равно а = v2/R.
Это ускорение называется центростремительным (или нормальным). Вывод этого равенства может быть следующим. Приведем векторы скорости к одной точке хотя бы за - Т (можно и за Т/2 или Т) (рис. 18).
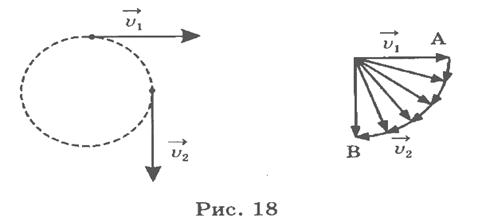
Тогда сумма изменений векторов скоростей за малые промежутки времени будет равна длине дуги АВ, которая равна модулю |v2 - v1| за время t = 1/4*Т.
Определим длину дуги. Поскольку радиусом для дуги будет модуль вектора v1=v2=v, то длина дуги l может быть вычислена как длина четверти окружности с радиусом v:

После сокращения получим:

Если же движение равнопеременное, то v Ф const, тогда рассматривают другую составляющую ускорения, обеспечивающую изменение модуля скорости. Это ускорение называется тангенциальным:

Тангенциальное ускорение направлено по касательной к траектории, оно может совпадать по направлению со скоростью (движение равноускоренное) или быть противоположно направленным (движение равнозамедленное).
Поиск по сайту: