АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Копировальные системы автоматического управления
В копировальных системах управления (механических и следящих) программоносителем является копир (плоский или объемный), представляющий собой прототип обрабатываемого изделия или его частей.
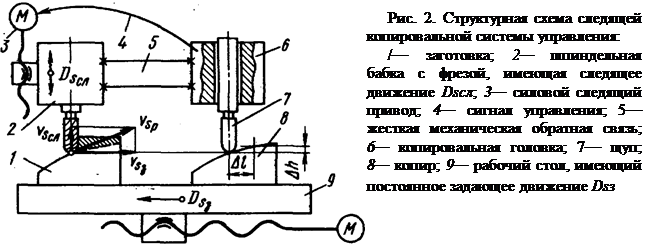 |
В механических копировальных системах копир выполняет функции управления и подачи режущего инструмента, воспринимая силы резания, а в следящих копировальных системах он осуществляет только функцию управления (рис. 2). Функцию рабочей подачи выполняет силовой следящий привод 3 (электрический или гидравлический), получающий сигналы управления 4 от копировальной головки 6 и обеспечивающий шпиндельной бабке 2 следящее движение подачи Dsсл. Это происходит при задающем движении Dsз стола 9 с копиром 8 на расстояние D l и подъеме щупа 7 относительно копировальной головки 6 на величину D l.
В результате при обработке заготовки 1 режущий инструмент перемещается со скоростями подач V sсл и V sз с получением результирующей скорости подачи Vsр.
Рассмотренный принцип работы следящих копировальных систем позволяет изготовлять копир из легкообрабатываемого материала, снижать его износ и тем самым повышать точность обработки. Резко сокращаются трудоемкость и стоимость изготовления копира.
Применяют электрические, гидравлические, электрогидравлические и другие следящие копировальные системы управления в основном на токарных и фрезерных станках.
Копировальные системы управления, как и системы управления с РВ, большей частью просты по конструкции, надежны в работе и имеют невысокую стоимость. Однако преобразование числовой информации чертежа изделия в аналоговый вид (кулачки, копиры) требует трудоемкого проектирования, изготовления физических аналогов и их последующей наладки на станке. Это приводит к низкой мобильности данных систем управления (особенно систем управления с РВ), а указанное преобразование числовой информации УП приводит к погрешностям передачи информации, возникающим при изготовлении кулачков и копиров и вследствие их изнашивания в процессе эксплуатации.
Поиск по сайту: