АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Тема 1. Общая характеристика систем автоматического управления (САУ)
Министерство образования и науки Украины
Донецкий национальный технический университет
Кафедра мехатронных систем машиностроительного оборудования
Молчанов Александр Дмитриевич
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТАНКОВ
Конспект лекций
(для студентов специальности 7.05050301 «Металлорежущие станки и системы», направление подготовки – 050503 «Машиностроение»)
Утверждено на заседании кафедры МСМО:
протокол заседания кафедры № 1 от 30.08.2013
Донецк 2013
Тема 1. Общая характеристика систем автоматического управления (САУ)
Системы автоматического управления и регулирования за долгий путь своего развития—от центробежных регуляторов паровых машин до современных комплексных САУ подвижными объектами—проникли во все области техники и стали определяющими при создании многих современных технических систем и устройств.
Автоматизированная система управления — человеко-машинная система, обеспечивающая автоматизированный сбор и обработку информации, необходимой для оптимизации управления в различных сферах человеческой деятельности.
При автоматическом управлении различными объектами необходимо получать от управляемого объекта сведения, чтобы на основании их осуществлять управляющие воздействия; поддерживать какой-то параметр в заданных пределах или изменять его по заданному закону; обеспечивать необходимые управляющие воздействия на объект в определенной последовательности (по заданной программе) и т. д.
По виду решаемых задач, связанных с управлением объектами, системы управления подразделяют на системы автоматического контроля, автоматического регулирования, следящие системы, системы автоматической защиты, автоматического управления, адаптивного управления, системы обработки данных, системы автоматического управления предприятием (АСУП), и т. д., причем функциональное назначение системы может быть совместным. Например, система автоматического регулирования представляет собой совокупность систем автоматического контроля и управления. Кроме того, автоматизированные системы могут быть комбинированными, т. е. представлять собой совокупность нескольких вышеперечисленных систем. Системы могут также отличаться видами применяемых в них устройств, параметрами, конструктивными решениями и т. д.
Система~автоматического контроля (САК) обеспечивает измерение различных физических величин (параметров), сведения о которых необходимы при управлении объектом. Всякая система состоит из элементов, узлов и устройств, выполняющих ту или иную функцию; следовательно, систему автоматического контроля можно предоставить в виде блок-схемы (рис. 1, а). Управляемым объектом может быть станок, машина, установка. Датчик обеспечивает измерение физической величины и получение от этой величины сигнала. Преобразующее устройство служит для преобразования сигнала к виду, удобному для использования в системе. Усилитель обеспечивает усиление сигнала до необходимой величины (уровня). Исполнительный орган (исполнительное устройство) предназначен для исполнения команд управления.
В системе автоматического контроля в качестве исполнительных органов, как правило, применяют указывающие устройства. Это всевозможные приборы, с помощью которых получают индикацию измеряемой величины; 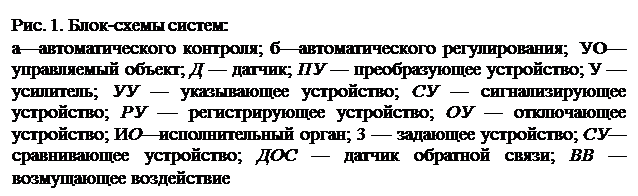
сиг
 |
нализирующие устройства, обеспечивающие выдачу сигнала от какого-то предельного или заданного значения величины; регистрирующие устройства, осуществляющие регистрацию измеряемой величины, как правило, в функции времени. Кроме того, в качестве исполнительных органов можно применять отключающие устройства (защитные исполнительные органы), которые защищают управляемый объект от аварийных режимов работы.
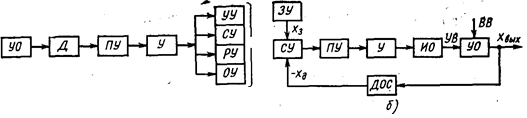
Система автоматического регулирования (CAP) обеспечивает поддержание регулируемой величины (параметра) в заданных пределах или по заданному закону (рис. 1, б). Задающее устройство обеспечивает воспроизведение задающего воздействия, определяющего закон изменения регулируемой величины. Как правило, эта величина задается в условном виде. Например, температура задается величиной напряжения; давление — натягом пружины и т. п. Сравнивающее устройство служит для сравнения задающего воздействия с действительным значением регулируемой величины в объекте. Оно может быть выполнено по мостовой или дифференциальной схеме, при этом в процессе сравнения заданной величины Хз с действительным значением величины Хд вычисляют через их разность. Следовательно, сигнал со сравнивающего устройства есть функция от разности сравниваемых величин, т. е. Dх = f (Хз — Хд),
Исполнительный орган обеспечивает воздействие на объект таким образом, чтобы восстановить отклонившуюся величину от заданного значения. Датчик обратной связи служит для измерения действительного значения величины - Хд и для подачи от этой величины сигнала на сравнивающее устройство.
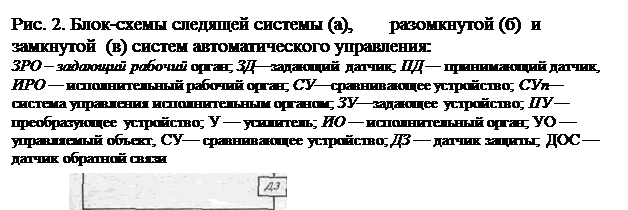
Следящая система — автоматическая система, в которой выходная величина воспроизводит с определенной точностью входную величину, характер изменения которой заранее неизвестен.
Входящие в блок-схему следящей системы (рис. 2, а) узлы и устройства выполняют следующие функции.
Задающий рабочий орган является ведущим, он задает закон изменения регулируемой величины. Задающий датчик измеряет положение задающего рабочего органа и связан с ним механически. Приемный датчик измеряет положение исполнительного органа и имеет с ним механическую связь. Исполнительный рабочий орган является ведомым, т. е. действия этого органа согласуются с действиями задающего рабочего органа. В некоторых датчиках сравнивающее устройство является их составной частью.
Кроме этого система управления может быть замкнутой или разомкнутой (рис.2, б, в).
 |
Входящие в блок-схемы систем автоматического управления (рис. 2, б, в) узлы и устройства выполняют следующие функции. Задающее устройство служит для хранения и выдачи команд управления объектом. В зависимости от способа задания программы управления система автоматического управления может быть, например, командной (циклической), где задающее устройство представляет собой штекерную панель или кулачковый командоаппарат, которые обеспечивают выдачу команд на управляемый объект в определенной последовательности и по определенному алгоритму (порядку). Преобразующее устройство служит для преобразования сигналов управления к виду, удобному для использования в системе. Например, в системах с ЧПУ при считывании программы с перфоленты осуществляется преобразование светового сигнала в электрический.
Датчик защиты является элементом системы автоматической защиты. Он обеспечивает измерение параметров в управляемом объекте, отклонение которых или достижение определенного значения вызывают аварийную остановку. Как правило, сигнал датчика формирует команду на останов ^управляемого объекта.
В замкнутых системах автоматического управления датчик обратной связи контролирует правильность исполнения команд, задаваемых задающим устройством, и обеспечивает выдачу сигналов на сравнивающее устройство. Сравнивающее устройство вырабатывает сигнал ошибки (рассогласование) на основании сравнения значения регулируемой величины с ее заданным значением.
Самоприспосабливающаяся (адаптивная) система — система автоматического управления, у которой автоматически изменяется способ функционирования (алгоритм) управляющей части для осуществления в каком-либо смысле наилучшего управления. В зависимости от поставленной задачи и методов ее решения возможны различные законы управления, поэтому системы адаптивного управления разделяют на следующие виды.
1. Адаптивные системы функционального регулирования (рис. 3, а) где управляющее воздействие является функцией какого-либо параметра. Например, подача есть функция от одной из составляющих силы резания, т. е. Sп == f(Pz), скорость резания есть, функция мощности, т. е. Vp == f (Np), и т. д.
2. Адаптивные системы предельного (экстремального) регулирования, которые обеспечивают поддержание предельного значения одного или нескольких параметров в объекте.
 |
3. Адаптивные системы оптимального регулирования (рис. 3, б), в которых учитывается совокупность многих факторов с помощью комплексного критерия оптимальности. В соответствии с этим критерием
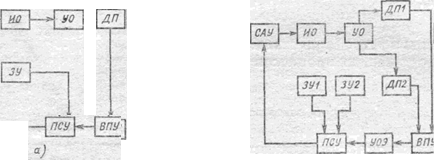
Рис. 3. Блок-схемы адаптивной системы функционального (а) и экстремального и оптимального (б) регулирования:
САУ— система автоматического управления; ИО— исполнительный орган; ДП— датчик измеряемых параметров; ВПУ — вычислительно-преобразующее устройство; ПСУ — преобразующее сравнивающее устройство; ЗУ — задающее устройство; БВК — блок ввода коэффициентов; УОЭ— устройство определения экстремума; УО —управляющий объект; УОЭ — устройство определения экстремума; ДП1 и ДП2— датчики измерения параметров
осуществляется изменение регулируемых параметров и величин. Например, поддержание в станке режима обработки, обеспечивающего максимальную производительность и наименьшую себестоимость обработки, определяется заданием оптимальных значений параметров (скоростей сил резания, температуры и т. д.), от которых зависят производительность и себестоимость процесса обработки.
В системы могут входить следующие элементы, узлы и устройства. Вычислительно-преобразующее устройство, входящее в блок схему, предназначено для вычисления и преобразования сигналов от измеряемых параметров. Преобразующе-сравнивающее устройство служит для сравнения действительного значения регулируемой величины (или величин), функционально от нее зависящей. Задающее устройство установлено для задания предельных значений параметров в экстремальных системах или величин, от них зависящих. Например, максимальное значение производительности может быть задано значением температуры режущего инструмента. В оптимальных адаптивных системах задающее устройство предназначено для задания функционально зависящих величин от регулируемых параметров. В оптимальных системах заданные параметры составляют комплексный критерий оптимальности.
Блок ввода коэффициентов служит для введения и изменения постоянных величин как исходных (начальных) данных и поправочных коэффициентов. Устройство определения экстремума необходимо для измерения регулируемого параметра по экстремуму и для определения и формирования знака сигнала регулирования.
В САУ обычно выделяют следующие основные устройства, из которых она состоит.
Объект управления (регулирования), представляющий собой машину, аппарат или установку, требуемый режим работы которых должен поддерживаться.
Регулятор, или управляющая часть САУ, поддерживает требуемый режим работы объекта управления либо изменяет этот режим в соответствии с заданным законом или программой управления. Регулятор, в свою очередь, включает в себя следующие устройства.
Измерительные и чувствительные устройства, предназначенные для измерения и преобразования регулируемых величин или возмущающих воздействий разнообразного физического происхождения в сигналы, передаваемые и используемые в САУ.
Программные, или задающие, устройства, предназначенные для выработки сигналов, меняющихся по заранее определенному закону.
Усилительно-преобразующие устройства, предназначенные для усиления сигналов, проходящих в регуляторах. Эти устройства преобразуют сигналы и управляют энергией, поступающей от внешнего источника в управляющие воздействия различного физического происхождения (электрические, гидравлические, пневматические и др.).
Корректирующие устройства служат для обеспечения требуемых характеристик по устойчивости, качеству и точности управления (регулирования). Эти устройства также могут иметь различное физическое происхождение (электронные микропроцессоры, электрические цепи, электромеханические преобразователи, гидравлические и пневматические контуры).
Исполнительные устройства осуществляют непосредственное воздействие на объект управления (механическое, электрическое, гидравлическое, пневматическое и т. п.).
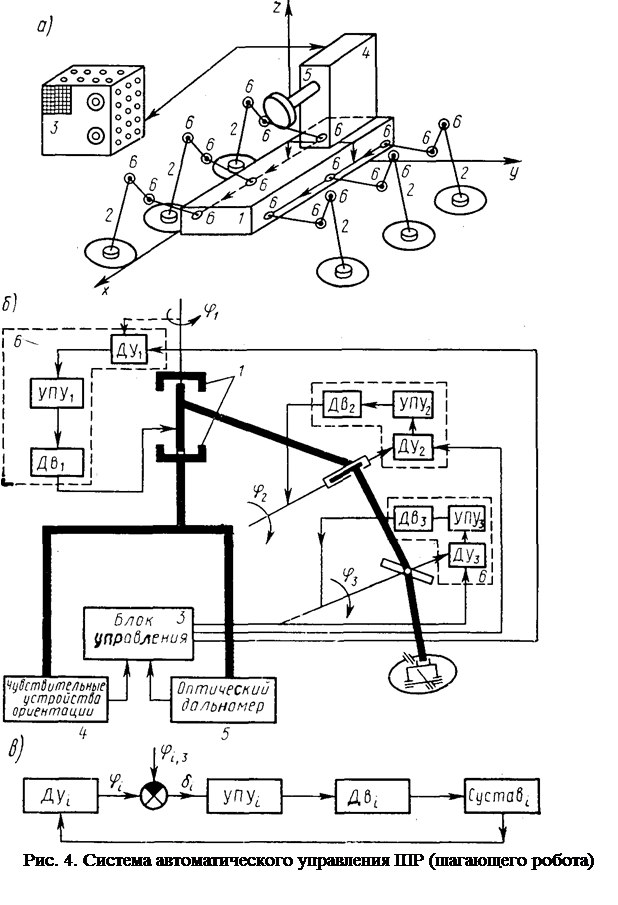
На рис. 4, а, б, в показана САУ шагающего робота (ШР), представляющего собой шестиногий шагающий аппарат. Объект управления 1 (корпус) под воздействием органов движения 2 (“ноги” робота) перемещается в направлении, задаваемом блоком управления с программным устройством 3; чувствительные элементы 4, включая оптический дальномер 5, измеряют все составляющие движения и передают их на приводы 6 звеньев ног робота.
Местные системы автоматического регулирования для каждого сустава приведены на рис. 4, б, в, где показаны элементы САР, аналогичные рассмотренным в предыдущих примерах: объект регулирования — соответствующие суставы “ноги”, исполнительный элемент—двигатель (Дв), прикладывающий момент М, к объекту регулирования; усилительно-преобразующее и корректирующее устройство (УПУ), измерительный элемент (ДУ), с которого снимается угол поворота сустава ji. Помимо перечисленных элементов, эта САУ содержит блок управления, который на основе системы ориентации вырабатывает “стратегию” и “тактику” движения ШР. Микропроцессоры входят в локальные САР этой САУ (УПУ) и в блок управления.
Наряду с основными обратными связями в этой многомерной САУ имеются местные обратные связи, множество разнородных физических элементов, непрерывные динамические процессы. Большое число противоречивых критериев характеризует работу этой САУ.
Обобщая характерные свойства САУ, рассмотренных в примерах, а также для широкого класса этих систем, можно выделить следующие их особенности:
1. Гетерогенность—физическая разнородность устройств и элементов, входящих в САУ.
2. Непрерывный динамический процесс их функционирования.
3. Многокритериальность условий их применения и работоспособности, при этом многие критерии противоречивы (точность и устойчивость, надежность и массогабаритные характеристики и т. д.).
4. Неопределенность задаваемых параметров и возмущающих воздействий, определяемая наличием не только внешних, но и внутренних “шумов”, нестационарностью во времени параметров устройств САУ.
5. Внедрение микропроцессоров или управляющих ЦВМ в САУ.
1. Наличие нескольких контуров управления, многомерность САУ.
Тема 2
Поиск по сайту: