АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Импульсная переходная функция
Линейные объекты с сосредоточенными параметрами описываются обыкновенными дифференциальными уравнениями, которые в общем случае можно записать в виде:

| (1-1) |
Коэффициенты этого уравнения an,…, a0 характеризуют конструктивные параметры объекта, физические и химические свойства веществ, а также различные гидродинамические и тепловые константы. Обычно все эти показатели называют “параметрами” объекта (в отличие от входных и выходных координат объекта x и y). Различают два типа объектов: стационарные объекты, параметры которых не изменяются во времени, и нестационарные объекты, свойства которых изменяются с течением времени (изменение теплопроводности стенок вследствие отложения солей и т. п.).
Стационарные линейные объекты описываются дифференциальными уравнениями с постоянными коэффициентами, нестационарные объекты - дифференциальными уравнениями, коэффициенты которых являются функциями времени. Большинство технологических объектов регулирования являются нестационарными объектами, однако скорость изменения их свойств намного меньше, чем скорость процессов регулирования этих объектов. Такие объекты при расчете системы регулирования можно приближенно рассматривать как стационарные в течение определенного промежутка времени, за который свойства объекта не успевают существенно измениться. Остановимся на рассмотрении этого класса объектов.
Дифференциальное уравнение объекта описывает его поведение в неустановившихся (переходных) режимах при любой форме входного сигнала x(t). Уравнение переходного процесса, соответствующее определенному виду функции x(t), можно получить как решение неоднородного дифференциального уравнения при соответствующей правой части и заданных начальных условиях.
Под начальными условиями переходного процесса понимается его состояние в момент времени, принятый за начало процесса при t=0; начальные условия задаются совокупностью значений выходной координаты и ее производных до (n-1)-го порядка включительно

| (1-2) |
Начальные условия называются нулевыми, если начальные значения выходной координаты и её производных все порознь равны нулю,

| (1-3) |
Для характеристики динамических свойств объектов широко используются переходные процессы, соответствующие типовым входным сигналам. Наиболее распространенными переходными процессами являются:
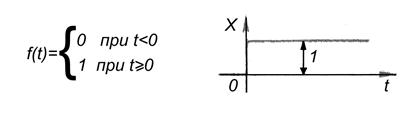
1) переходная функция h(t), которая показывает, как изменяется выход-ная координата объекта при подаче на его вход сигнала в виде единичной ступенчатой функции 1(t), называемой функцией Хевисайда (рис. 7):
|
| Рис. 7 |
Уравнение переходной функции может быть получено как решение дифференциального уравнения при x(t)=1(t) и нулевых начальных условиях:

| (1-4) |
Обычно переходная функция объекта определяется экспериментальным путем и используется как исходные данные для расчета системы автоматического регулирования данного объекта.
Рассмотрим для примера гидравлическую ёмкость. Предположим, что объект находится в состоянии равновесия, т.е. an0=ac0=const и, следовательно H0=const (рис. 8). Подадим на вход объекта ступенчатое возмущение на стоке жидкости, т.е., увеличив резко степень открытия вентиля, изменим скачком сток жидкости от Qn1 до Qn2. В результате нарушения материального баланса уровень в резервуаре начнет уменьшаться, что приведет к уменьшению расхода жидкости через вентиль и по окончании переходного процесса в системе установится новое cостояние равновесия.

|
| Рис. 8 |
Как видно из описания эксперимента, на вход объекта было подано ступенчатое возмущение, величина которого x(t)=(Qn2-Qn1)1(t). Переходный процесс на выходе объекта в таком случае называется кривой разгона. Для получения переходной функции достаточно разделить ординаты кривой разгона на величину возмущения.
2) импульсная переходная функция или весовая функция h(t), показывающая реакцию объекта на единичный мгновенный импульс d(t) называемый дельта-функцией или функцией Дирака (рис. 10).
Дельта-функцией d(t-t0) называется функция, удовлетворяющая следующим условиям:

| (1-5) (1-6) | 
| 
|
| Рис. 9 | Рис. 10 |
Нетрудно показать, что в силу соотношений (1-6) дельта-функция обладает следующим свойством

| (1-7) |
т.е. интеграл от произведения какой-либо функции x(t) на дельта-функцию, поданную в момент t0, равен значению функции в этот момент времени x(t0). Иными словами, с помощью дельта-функции через соотношение (1-7) из непрерывной функции можно “вырезать” одну ординату. Таким образом дельта-функция представляет собой импульс бесконечно малой длительности и бесконечно-большой амплитуды. Такую функцию можно представить как предел, к которому стремится прямоугольный импульс в основанием Dt и с площадью, равной единице (рис. 10), если основание импульса уменьшать (Dt→0) так, чтобы площадь импульса сохранялась равной единице.
Импульсная переходная функция (ИПФ) используется для определения выхода объекта при произвольном входном сигнале x(t) (рис. 11),

|
| Рис. 11 |
Где t-непрерывный параметр, показывающий временной сдвиг каждого импульса, т.е. 0<=t< ¥.

| (1-8) |
| (1-9) |
Уравнение (1-8) показывает, что любая непрерывная функция может быть представлена суммой элементарных импульсов, совпадающих с ординатами функции. Уравнение (1-9) является уравнением свертки, отражающим связь между входом, выходом объекта и его ИПФ.
Поиск по сайту: