АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
ЛОГИСТИКА СКЛАДИРОВАНИЯ
Зубчатая передача, у которой геометрическая ось хотя бы одного из колес подвижна, называется планетарной. Различные планетарные механизмы можно представить в виде трех типов передач.
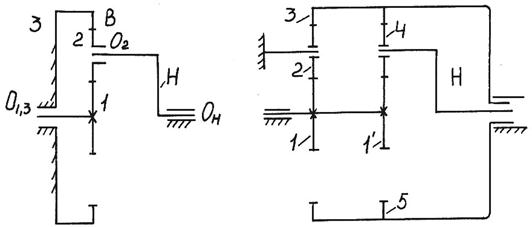
1. Простые планетарные передачи, обладающие одной степенью подвижности, у которых одно из основных звеньев закреплено неподвижно (рис. 4.7, закреплено звено 3). Такие механизмы служат для последовательной передачи потока мощности.
2. Дифференциальные передачи, обладающие двумя степенями подвижности, у которых все основные звенья подвижны (рис. 4.6). Эти передачи позволяют суммировать два или несколько потоков мощности, поступающих от независимых источников, либо распределять их по независимым потребителям.
3. Замкнутые дифференциальные передачи, получаемые из дифференциальных передач путем замыкания двух основных звеньев (цент-
рального колеса и водила) простой передачей, состоящей из колес 1, 2, 3 (рис. 4.8). Такие передачи позволяют получить большие передаточные отношения при малых габаритах.
Рассмотрим механизм, изображенный на рис. 4.6. Определим число степеней подвижности, если  = 4 - число звеньев,
= 4 - число звеньев,  и
и  – число кинематических пар V и IV класса.
– число кинематических пар V и IV класса.


Определенность в движении звеньев уэтого механизма будет в том случае, если будут заданы законы движения двум звеньям.
Основными звеньями механизмов с подвижными осями являются водило (Н) и соосные с ним колеса (1 и 3). В данном случае все основные звенья подвижные. Оба эти признака (W> 1 и подвижные основные звенья) определяют дифференциальный механизм.
Определим степень подвижности для механизма, изображенного на рис. 4.7

У этого механизма колесо 3 (основное звено) неподвижно и W= 1. Оба признака определяют планетарный механизм. Механизмы замкнутых дифференциалов имеют все основные звенья подвижными, но число степеней подвижности равно единице (W= 1). Таким образом, только по совокупности двух признаков механизмы с подвижными осями можно отнести к тому или иному типу.
формулы 4.5, 4.7 для определения передаточного отношения планетарных и дифференциальных механизмов использовать нельзя,
так как сателлит участвует в сложном движении, состоящем из вращения вокруг оси O2 и вращения вместе с водилом Н вокруг оси Он (см. рис.4.6, 4.7).


Для вывода зависимостей, связывающих угловые скорости механизмов, имеющих подвижные оси, воспользуемся методом обращения движения.
Допустим, что в действительном движении звенья механизма (см. рис. 4.6) имеют угловые скорости  . Сообщим всем звеньям скорость, равную угловой скорости водила, но противоположно ей направленную, т.е.
. Сообщим всем звеньям скорость, равную угловой скорости водила, но противоположно ей направленную, т.е.  . В этом случае угловые скорости звеньев будут соответственно равны:
. В этом случае угловые скорости звеньев будут соответственно равны:
Так как водило Н стало неподвижным ( ), то мы получили "обращенный механизм" с неподвижными осями. Для этого механизма справедлива зависимость
), то мы получили "обращенный механизм" с неподвижными осями. Для этого механизма справедлива зависимость

где  –передаточное отношение "обращенного механизма, которое можно определить через число зубьев колес:
–передаточное отношение "обращенного механизма, которое можно определить через число зубьев колес:

В правую часть предыдущей зависимости подставим значение относительных скоростей:
 (4.9)
(4.9)
Полученное уравнение называется формулой Виллиса для дифференциальных механизмов. Левая часть, как показано выше, может быть выражена через число зубьев колес. Определенность в решении правой части будет иметь место, когда будут известны скорости двух ведущих звеньев. Установим, какой вид примет формула Виллиса для планетарного механизма, изображенного на рис. 4.7. У этого механизма колесо 3 жестко соединено со стойкой (заторможено), т.е.  .
.
Таким образом, имеем
Откуда  (4.10)
(4.10)
Полученную зависимость называют формулой Виллиса для планетарных механизмов, а передаточное отношение  – планетарным передаточным отношением.
– планетарным передаточным отношением.
Как и для дифференциальных механизмов, определяется через число зубьев колес.
В общем 'случае:

где  – передаточное отношение от звена К к звену l (l -соответствует неподвижному центральному колесу).
– передаточное отношение от звена К к звену l (l -соответствует неподвижному центральному колесу).
Достоинством планетарных механизмов является возможность получения больших передаточных отношений при малых_ габаритах.
Пример 1. Определить передаточное отношение  планетарного механизма (рис. 4.9), если Z1 = 100, Z2 = 99, Z2´ = 100, Z3´ = 101.
планетарного механизма (рис. 4.9), если Z1 = 100, Z2 = 99, Z2´ = 100, Z3´ = 101.
Это одноступенчатый планетарный редуктор. Используя формулу (4.10), запишем
Пример 2. В зубчатой передаче, показанной на рис. 4.10, входное коническое колесо 1 в данный момент имеет угловую скорость  = 340 с-1 и постоянное угловое ускорение
= 340 с-1 и постоянное угловое ускорение  = 285 с-2, направленное по движению.
= 285 с-2, направленное по движению.
Z1 = Z2 = 18; Z2´ = Z4´ = 18; Z3 = Z5 = 30; Z3´ = Z5´ = 22; Z4 = Z6 = 70.
Принять средний модуль конического колеса mm = 2 мм, ширину колеса b= 20 мм, плотность ρ = 8000 кг/м, смещение центра масс (точки А, рис.4.11) l = 2 мм.
Определить:
1) передаточное отношение между входным и выходным звеньями и направление вращения;
2) угловую скорость и угловое ускорение выходного звена, их направление показать на схеме передачи;
3) время, в течение которого угловая скорость увеличится в 2 раза;
4) величину и направление силы инерции и момента пары сил инерции звена 1 в начале и в конце найденного в предшествующем пункте промежутка времени, сравнить силу инерции с силой тяжести и показать чертежом направления вращения, ускорения и инерционных нагрузок;
5) общий коэффициент полезного действия передачи.
Решение.
1. Определить передаточное отношение механизма.
Выделим из механизма ступень с неподвижными осями, состо-
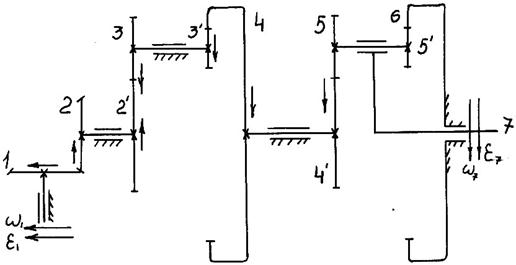

ящую из колес Z1, Z2, Z2´, Z3, Z3´, Z4, и планетарную ступень, состоящую из колес Z4´, Z5, Z5´, Z6 и водила Н (7);
а) для ступени с неподвижными осями

оси колес 1 и 4 непараллельные, поэтому знак передаточного отношения не определяем, а покажем направления вращения колес неподвижной ступени в соответствии с правилом стрелок:

б) чтобы определить передаточное отношение планетарной ступени, используем формулу Виллиса; остановим водило Н (7), используя зависимость (4.9), получим

колесо 6 неподвижно ( = 0), используя зависимость (4.10), получим
= 0), используя зависимость (4.10), получим

в) передаточное отношение всего механизма

Передаточное отношение планетарной ступени  . Следовательно, водило Н (7) вращается в ту же сторону, что и колесо 4.
. Следовательно, водило Н (7) вращается в ту же сторону, что и колесо 4.
Покажем направление угловой скорости  и углового ускорения
и углового ускорения  на чертеже стрелками.
на чертеже стрелками.
Поскольку  , вращение ускоренное.
, вращение ускоренное.
2. Угловая скорость и угловое ускорение ведомого звена 7 по модулю:

3. Определить время, в течение которого угловая скорость увеличивается вдвое 
Для ускоренного вращения 
Отсюда 
4. Для расчета момента инерции  коническое ведущее колесо со средним модулем mm = 2 мм, Z1 =18 заменим цилиндром с диаметром, равным среднему делительному диаметру.
коническое ведущее колесо со средним модулем mm = 2 мм, Z1 =18 заменим цилиндром с диаметром, равным среднему делительному диаметру.

С учетом сказанного масса определяется по формуле

где ρ – плотность, ρ = 8000 кг/м3 (по условию).

Вес колеса

Смещение центра масс (точки А) (см. рис. 4.11)
l = 2 мм = 0,002 м.
Нормальная составляющая силы инерции

Нормальное ускорение точки A.


Касательное ускорение точки A и касательная составляющая силы инерции:

Определим полное ускорение точки А, силу инерции и направление силы инерции:
В практических расчетах составляющей  как малой величиной можно пренебречь и считать, что
как малой величиной можно пренебречь и считать, что  Сравним силу тяжести и силу инерции:
Сравним силу тяжести и силу инерции:
Силой веса по сравнению с силой инерции при практических расчетах такие можно пренебречь.
Момент сил инерции

Покажем направление всех векторных величин на чертеже.
 5. Определить общий КПД механизма.
5. Определить общий КПД механизма.

Здесь  – КПД конической пары с учетом потерь в подшипниках[4].
– КПД конической пары с учетом потерь в подшипниках[4].
 – КПД цилиндрической пары (2 пары по условию);
– КПД цилиндрической пары (2 пары по условию);
 – КПД планетарной передачи.
– КПД планетарной передачи.

ЛОГИСТИКА СКЛАДИРОВАНИЯ
Поиск по сайту: