АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Выбор метода соединения Q1 и Q2 и заполнение структуры
Продолжение алгоритма JoinPlan (Q1, Q2) (см. п. 1.7.4):
// Стоимость соединения Q1 и Q2
С = min(С1 ,С2)= min(660, 340) = С2 =340 (мс) // SMJ
// Текущая стоимость плана
С = str[1].Z + str[2].Z + C = 0,32 + 11000 + 340 @11340 (мс),
// где str[1].Z и str[2].Z – стоимости выбора записей из
// исходных таблиц R1 и R2 (см. пункты 1.8.3 и 1.8.4),
// С (справа) – стоимость соединения по методу SMJ.
// Стоимость ввода/вывода
СI/O = str[1].ZIO + str[2].ZIO + CI/O 2 = 0,3 + 10000 + 10 ≈ 10010 (мс).
// Значения полей V структуры str[3] (формулы (5.10) в п. 1.6.4):


 .
.
Заполнение структуры str[3] (п. 1.7.2):
str[3] = {{Q1, Q2}, {Q1}, {Q2}, // W, X, Y
11340, 10010, // Z, ZIO
{2, 1, {2}, 2} } // V -  , B, I, k
, B, I, k
1.8.8. Оценка и выбор метода соединения Q2 и Q1
В алгоритме динамического программирования (см. п. 1.7.1):
n = 2, i = 2, P = (Q1, Q2), Qj = Q1 .
В JoinPlan (Q2, Q1) (см. п. 1.7.4):
R = P – Q1 = Q2, S = Q1 , "а" – атрибут "номер_счета".
Алгоритм:
m1 = 2, m2 = 1 // номера экземпляров в структуре str, т.к.
// str[m1=2].W= Q2 и str[m2=1].W= Q1
// Оценка стоимости соединения R и S (см. формулы пунктов 1.8.5 и
// 1.8.6)
1. NLJ, i=1

2. SMJ, i=2

// Стоимость соединения Q2 и Q1
С = min(С1,С2) = С2= 340 (мс) // SMJ
// Текущая стоимость плана
С = str[2].Z + str[1].Z + C = 11340 (мс)
Запись str[3] не изменяется, так как старое значение str[3].Z совпадает с новым значением (C).
1.8.9. Вывод физического плана
Алгоритм OptPlanReturn (см. п. 1.7.5):
1.  метод 2 (т.е. SMJ)
метод 2 (т.е. SMJ)
2. Q1 = метод 2
(т.е. IndexScan(R1, код_пользователя = 3) +
Filter (реализация проекции по номеру счета)
)
3. Q2 = метод 1
(т.е. TableScan(R2) +
Filter (селекция по условию остаток > 1500 и реализация
проекции по остатку и номеру счета)
)
Метод чтения записей из R2 (чтение всех записей) является причиной высокой стоимости выполнения запроса.
На рис. 1.25 представлен разработанный оптимальный физический план в графическом виде.
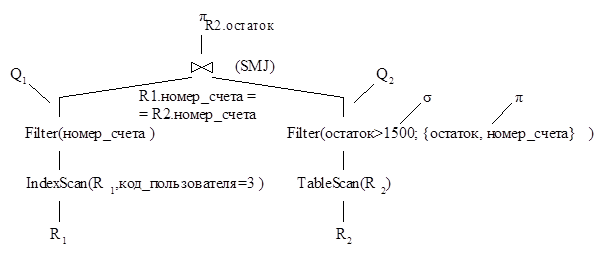
Рис. 1.25. Представление физического плана в графическом виде.
Поиск по сайту: