АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
(Вариант 31,  ,
,  )
)
Постановка задачи. Манипулятор, кинематическая схема которого приведена на рис.1, перемещает точечный груз массой  за время
за время  из точки
из точки  в точку
в точку  с заданной скоростью
с заданной скоростью 
Управляющие двигатели расположены в шарнирах  и
и  .
.
Дано:

Массой элементов конструкции можно пренебречь.
Требуется:
1. Составить уравнения кинетостатики для определения управляющих моментов, реализующих заданное программное движение груза.
2. Составить кинематические уравнения, определяющие изменение во времени угловых скоростей, углов поворота звеньев и скорости точки С.
3. Решить полученные уравнения на ЭВМ на интервале времени  .
.
4. Построить графики  .
.
5. Для момента времени  определить с помощью графоаналитического метода угловые скорости звеньев, скорость точки С и сравнить с результатами счета на ЭВМ.
определить с помощью графоаналитического метода угловые скорости звеньев, скорость точки С и сравнить с результатами счета на ЭВМ.
6. По данным счета найти мощность каждого двигателя при  .
.
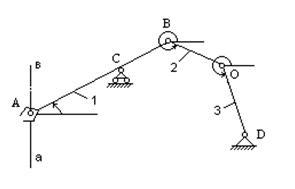 Рис.1 Рис.1
| 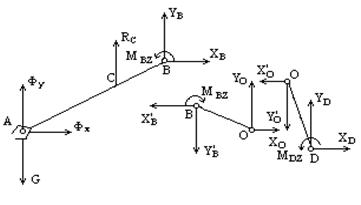 Рис. 2
Рис. 2
|
4.1. Составление уравнений кинетостатики
для управляющих моментов
Освободим систему от связей, как показано на рис.2.
Изобразим реакции связей, активные: силу  точки А и внутренние моменты управления
точки А и внутренние моменты управления  ,
,  .
.
По принципу Даламбера условно приложим к точке А силу инерции  . Для заданного движения точки А вычислим:
. Для заданного движения точки А вычислим:

| (8.1) |

| (8.2) |
Составим уравнения равновесия систем сил.
Из уравнений проекций сил на ось х для звеньев 1, 2 и 3 с учетом (8.1), (8.2) получим

| (9) |
Из уравнений проекций сил на ось y для звеньев 2 и 3 получим
| (10) |
Составим с учетом (8), (9), (10) уравнение моментов для звена 1 относительно точки С, для звена 2 относительно точки В, для звена 3 относительно точки О. Вычисление моментов производится с помощью формул вида

|
Проделав выкладки, получим

| (11) |
Отсюда
Поиск по сайту: