АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Построение статических характеристик объекта регулирования и системы управления
Для определения взаимосвязи между статическими характеристиками объекта и ДРИМ изобразим их в одной системе координат. В результате эти две статические характеристики пересекутся в точке А. Эта точка называется рабочей. Угол
пересечения этих двух статических характеристик равен 87о
Из теории автоматического регулирования известно, что при пересечении двух статических характеристик под углом от 60 до 90о система характеризуется хорошей устойчивостью.
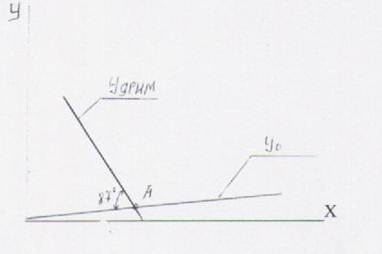
Для расчета динамического коэффициента регулирования Dрассматривается общая статическая характеристика объекта и ДРИМ.
По характеристике ДРИМ определяется возможный диапазон изменений входного параметра от 0 до 4,58, т.е  Хвх = 4,58. Далее переносим эти две точки на характеристику объекта и находим 'Y = 0,21. Подставим эти значения в выражение
Хвх = 4,58. Далее переносим эти две точки на характеристику объекта и находим 'Y = 0,21. Подставим эти значения в выражение
Из теории автоматического управления известно, что при D =1 система имеет оптимальную передачу сигнала в замкнутом контуре, при D > 1 в цепь обратной связи следует включить ослабитель сигнала; при D< 1 в цепь обратной связи следует включить усилительный элемент Для получения динамического коэффициента равного единице, в цепь обратной связи включается усилительный элемент с коэффициентом передачи К=20.
Поиск по сайту: