АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Определение аналитического выражения регулирующей системы - ДРИМ
Для этого преобразуем статические характеристики датчика, регулятора и исполнительного механизма.
Уравнения для объекта регулирования Yо = Хо/ N
Уравнение для датчика 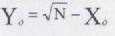
Уравнение для регулятора 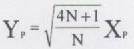
Уравнение для исполнительного механизма 
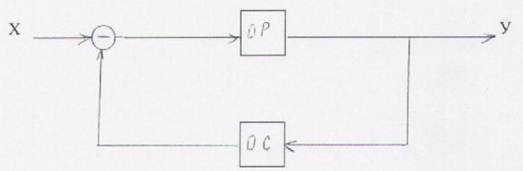
Из структурной схемы управления видно, что Yд = Хр; Yр = Хим
Подставим уравнение датчика в уравнение регулятора, а полученное результирующее уравнение подставим в уравнение исполнительного механизма:
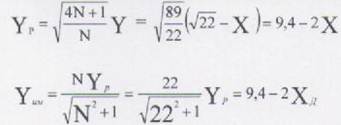
В результате получено выражение Yим = 9,4 - 2Хд
Это выражение является статической характеристикой цепи обратной связи, полученной аналитическим способом. Оно также описывает статическую характеристику цепи обратной связи, полученную ранее графическим способом.
2.5 Нахождение аналитическим способом рабочей точки системы.
Для определения координат рабочей точки системы по аналитическому выражению строится структурная схема полученной системы в виде двух элементов с целью определения взаимосвязи регулирующих параметров.
Поскольку статические характеристики представляются прямыми линиями, то необходимо найти точку пересечения двух прямых линий, которые задаются уравнениями:
Обозначим Хд=Хо=Х; Уим=Уо=У, в результате получим
Решается система уравнений и определяются координаты рабочей точки
Поиск по сайту: