АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Система уравнений в нормальной форме Коши
ОТЧЕТ
О прохождении преддипломной практики.
Выполнил:
студент группы
КУБ-1-11
Краснов Л.В.
Шифр: 111257
Проверил: Алешин А.В.
МОСКВА – 2015
Задание на данную производственную практику:
1) Разработка диалоговой программы для моделирования динамических процессов и оптимизации параметров в системе управления глубиной и курсом подводного аппарата.
2) Исследование системы управления курсом подводного аппарата и параметрическая оптимизация регуляторов.
3) Описание факторов влияющих на управляемость подводной лодки.
Оглавление.
Пункт 1 Разработка диалоговой программы для моделирования динамических процессов………………..3
Пункт 2 Исследование системы управления курсом подводного аппарата…………………………………17
Пункт 3 Описание факторов влияющих на управляемость подводной лодки……………………………….19
Заключение ……………………………………………………………………………………………………..26
Пункт 1. Разработка диалоговой программы для моделирования динамических процессов и оптимизации параметров в системе управления глубиной и курсом подводного аппарата.
Исходные данные
| Блоки | блок 1 | 11. Интегратор, охваченный обратной связью | |
| исполнит. механизма | блок 2 | 10. Составной блок | |
| Коэф- | К1 | ||
| фициенты | Т1 | 0.5 | |
| блока 1 | Ksi1 | - | |
| Коэффициенты блока 2 | К2 | 1.2 | |
| Т2 | 0.7 | ||
| Ksi2 | - | ||
| Тип регулятора | ПИ | ||
| Кп | 0.5 | ||
| Исходные | Ки | 0.8 | |
| параметры | Lи | 3.5 | |
| регулятора | Кд | - | |
| Тд | - | ||
| Критерий | J1 | ||
| Весовые | r1 | 0.9 | |
| коэф-ты | r2 | 0.1 | |
| Оптимизируемые | Кп | ||
| параметры | Ки | ||
2. Структура системы управления
Построить систему управления подводным аппаратом по курсу и по глубине, воздействуя на горизонтальные рули Dg и вертикальные рули Db (максим. отклонение рулей ± 0.5 радиан).
Основные обозначения координат и дифференциальные уравнения, описывающие динамику движения подводного аппарата, приведены ниже.
| K1 |
| Следящая система вертикаль-ных рулей |
| Модель ПА |
| Курс Fi (рад) |
| Заданный курс |
| Скорость винта n |
| K2 |
| Глуби- на Eta (м) |
| Заданная глубина |
| Следящая система горизонт. рулей |
Рис. 1. Структура системы управления
Структурная схема следящей системы исполнительных механизмов имеет вид, представленный на рис. 2. Ее следует исследовать отдельно от всей системы и подобрать оптимальные параметры регулятора.
| Регулятор |
| блок 1 |
| блок 2 |
| x |
| e |
| u |
| y |
| Kос |
| Исполнительный механизм |
Рис.2. Структурная схема следящей системы исполнительного механизма.
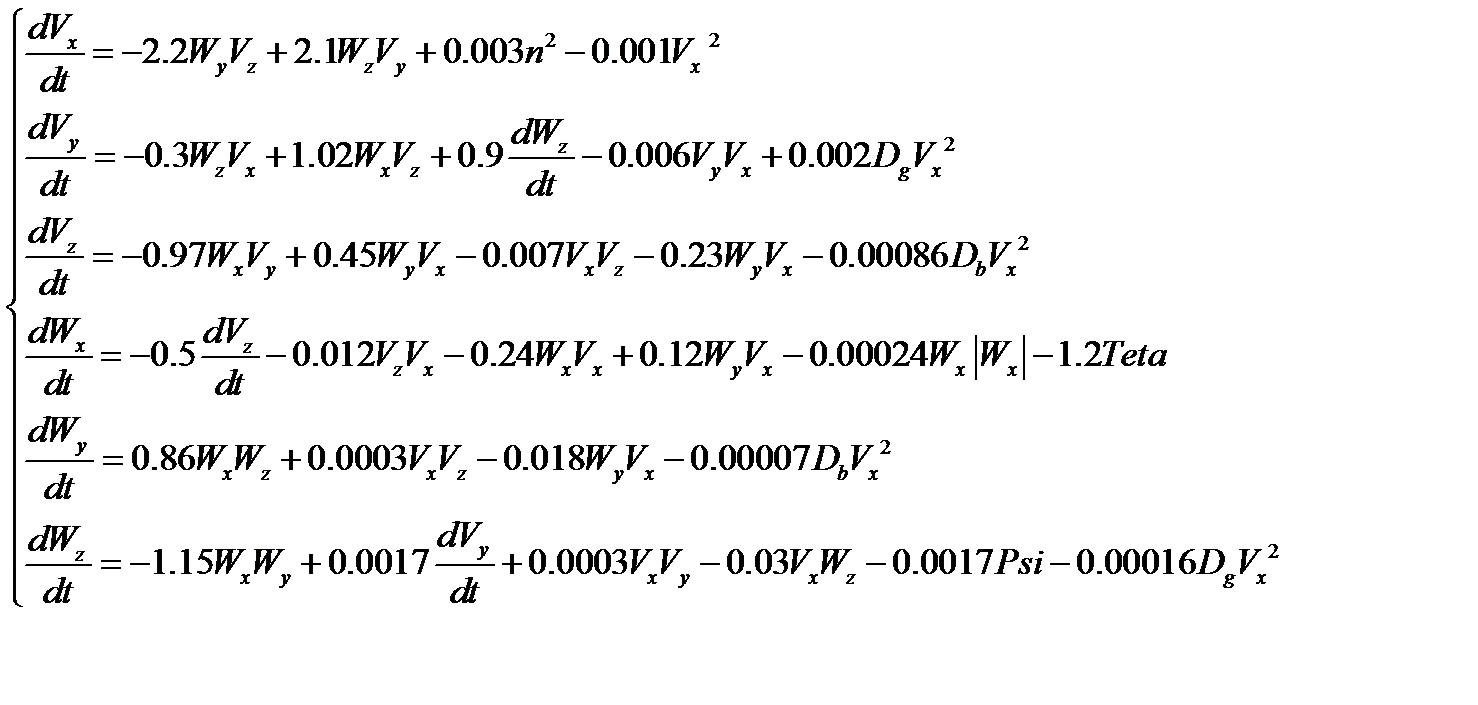
Система уравнений в нормальной форме Коши

Дифференциальные уравнения, описывающие движение в связной системе координат:
Дифференциальные уравнения для расчета углов и отклонений:

Уравнения следящей системы: 
Поиск по сайту: