АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Результат расчётов
Используя программу RDS, создадим блок подводного аппарата с автоматически компилируемой моделью и протестируем его, подав в качестве констант угол отклонения горизонтальных и вертикальных рулей и скорость вращения винта:

График изменения выходной координаты y(t) в разомкнутой системе

График изменения выходной координаты y(t) в замкнутой системе (Кос=0) при подаче на вход единичного входного воздействия для исходных значений параметров регулятора

График изменения выходной координаты y(t) в замкнутой системе при найденных оптимальных значениях параметров регулятора

График перехода подводного аппарата на курс -1рад глубину 50 м:

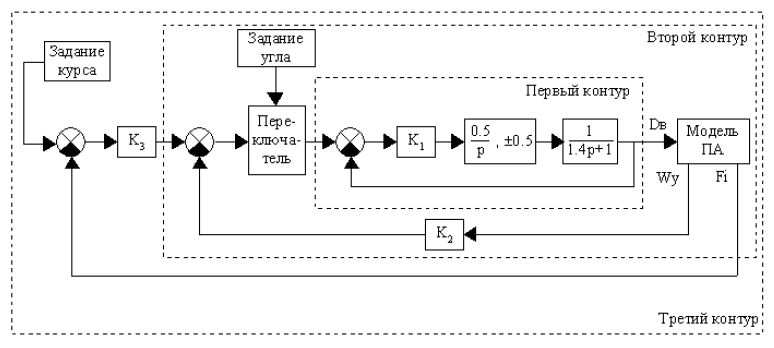
Пункт 2. Исследование системы управления курсом подводного аппарата и параметрическая оптимизация регуляторов.
Исследуемая система:
Создание модели интегратора с ограничением.
Дифференциальное уравнение обычного интегратора:

Разностное уравнение (h – шаг расчета):
Текст модели обычного интегратора на языке Си:

Введение ограничения L:

if(y>L) y=L;
else if(y<-L) y=-L;

Создание модели блока-переключателя режима.
if(N==0) y=x0;
else y=x1;
где N – вход выбора варианта (0 – ручной режим, 1 – автоматический режим).
Параметрическая оптимизация первого контура системы управления
(рулевого привода).
Критерий оптимизации:

Найденное оптимальное значение:
K1=9.453125
Переходный процесс в первом контуре при оптимальном K1:

Параметрическая оптимизация второго и третьего контуров системы
Управления.
Критерий оптимизации:

Найденные оптимальные значения:
K2= –13.5
K3= –148.125
Переход ПА на курс 1 радиан при оптимальных K2 и K3:

Пункт 3. Факторы, влияющие на управляемость подводной лодки в горизонтальной плоскости.
Под управляемостью подводной лодки в горизонтальной плоскости понимаетсяее способность изменять направление своего движения и сохранять заданный курс под действием вертикального руля и движителей. На управляемость подводной лодки влияет ряд факторов: одни факторы зависят от подводной лодки, а другие являются по отношению к ней внешними.
К первой группе факторов относятся: форма и размеры вертикального руля, количество гребных винтов, главные размерения подводной лодки и их соотношение между собой, скорость хода и направление движения, наличие и величина крена и дифферента.
Не менее существенное влияние на управляемость подводной лодки оказывают факторы второй группы: направление и сила ветра, наличие и направление волнения и течения, характер глубин, ограниченность водного пространства в районе маневрирования. Все эти факторы должны учитываться при управлении подводной лодкой. Рассмотрим воздействие вышеперечисленных факторов на подводную лодку.
1) Влияние гребных винтов.
Гребные винты, вращаясь в водной среде, создают силу тяги за счет реакции масс воды, отбрасываемых ими в сторону, противоположную движению корабля. Работая вблизи корпуса подводной лодки, они существенно изменяют его поле скоростей, что приводит к изменению гидродинамических сил, действующих на корпус. В свою очередь, поток воды.набегающий на винт, получает возмущение от корпуса, а гребные винты, отбрасывая в определенных режимах массы воды, воздействуют на корпус, осе зги, вызывая появление дополнительных сил, не может не сказываться на управляемости подводной лодки.
В результате сложного гидромеханического взаимодействия системы «корпус—винт—руль» в общем случае возникает целый ряд сил, влияющих на управляемость подводной лодки, которые необходимо командиру учитывать и рационально использовать, управляя кораблем в различных условиях. Такими силами являются:
— силы, возникающие на гребных винтах (сила реакции воды на работу гребного винта Rpв, сила попутного потока Рпп, сила сопротивления неработающего винта Fcnp);
— силы, возникающие от масс воды, набрасываемых гребным винтом на рули и корпус подводной лодки (сила винтовой отработки Fво, сила набрасываемой струи Fнс);
— силы, возникающие от работы гребного винта на рулях и корпусе подводной лодки (сила всасываемой струи Qвс, сила неравномерного давления Fнд, сила упора гребных винтов Т).
2) Сила реакции воды на работу гребного винта Rpв (рис. 22) возникает вследствие различных условий для работы лопастей винта при их круговом движении. Это обусловлено близостью поверхности и, вследствие этого, различной податливостью водной среды к изменению своих форм. Сдвиг масс воды лопастью гребного винта при его вращении вызывает реакцию в сторону, противоположную движению лопасти. Величина силы реакции имеет наибольшее и наименьшее значения при прохождении лопастью соответственно нижнего и верхнего положений. Поэтому результирующая сила Rpв стремится отклонить корму подводной лодки в сторону вращения гребного винта при работе его как на передний, так и на задний ход. Она имеет наибольшую величину при даче оборотов, т. е. в начальный момент сдвига масс воды гребным винтом, после чего с началом движения и увеличением скорости за счет уменьшения угла атаки водного потока на лопасти и возникновения на переднем ходу силы попутного потока Рпп уменьшается и принимает минимальное значение на установившимся ходу для данных оборотов гребного винта. В эксплуатационных условиях Rpв с наибольшей эффективность проявляется также при даче реверса (контрреверса) и при работе гребного винта «на упор», когда подводная лодка не имеет движения. Сила Rpв резко уменьшается с увеличением заглубления винта.

Рис. 22. Сила реакции воды вращению гребного винта
Сила попутного потока Рпп возникает только на переднем ходу вследствие увеличения угла атаки из-за уменьшения скорости набегающего потока на лопасти гребного винта, проходящие верхнюю половину диска вращения. Причиной тому является попутный поток, вызываемый движением корпуса подводной лодки в водной среде. Скорость попутного потока может достигать 0,5…0,7 Vл в зависимости от конструкции кормовой оконечности подводной лодки. Чем полнее кормовые обводы, тем выше скорость попутного потока при данной скорости хода. Результирующая сила попутного потока направлена в сторону, противоположную вращению винта. Она возникает с началом движения и появлением попутного потока, возрастает с увеличением скорости, а при установившемся движении имеет максимальную величину для данной скорости подводной лодки. Рпп уменьшает влияние Rpв на управляемость подводной лодки.
Сила сопротивления неработающего винта — Fcпp снижает скорость подводной лодки и ухудшает ее управляемость. На двухвинтовых подводных лодках сила сопротивления неработающего винта одного борта при движении подводной лодки создает момент, который разворачивает ее в сторону этого борта.
Сила винтовой отработки — Fво (рис. 23) проявляется в повышении эффективности вертикального руля, расположенного в потоке масс воды, отбрасываемых гребным винтом, за счет увеличения скорости обтекания руля потоком воды.
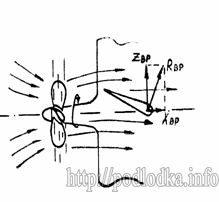
Рис. 23. Сила винтовой отработки
За счет этой силы в некоторой степени повышается эффективность вертикального руля на подводных лодках с рулем, расположенным перед гребным винтом, при работе винта на задний ход.
3) Сила набрасываемой струи — Fнc (рис. 24) возникает вследствие воздействия поперечных составляющих спирального потока воды отбрасываемого гребным винтом на корпус, стабилизатор и вертикальный руль подводной лодки. Величина и направление действия силы набрасываемой струи зависит от конструкции кормовой оконечности, взаимного расположения винтов, рулей, удаленности гребного винта от корпуса подводной лодки, количества оборотов, под каким углом и на какую площадь воздействуют массы воды, стремясь уклонить подводную лодку с заданного курса.
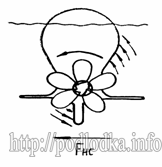

Рис. 24. Действие силы набрасываемой струи в зависимости от взаимного расположения корпуса, винта и стабилизаторов
Сила всасываемой струи (рис. 25) возникает при действии на выведенный из диаметральной плоскости вертикальный руль потока воды, засасываемого гребным винтом. Она возникает только при работе гребного винта на задний ход и обозначается Qвс. Действие силы всасываемой струи аналогично действию гидродинамической силы встречного потока воды на вертикальный руль.
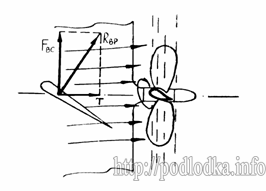
Рис. 25. Сила всасываемой струи
4) Сила неравномерного давления — Fнд возникает в кормовой части корпуса подводной лодки с бортовыми движителями три работе одного из них за счет местного падения или повышения давления перед гребным винтом. Она направлена соответственно в сторону работающего или неработающего борта, ее величина зависит от числа оборотов гребного винта и его отстояния от борта. Сила упора гребных винтов (движителей) —Т при работе одного борта (при различном количестве оборотов двух бортов, при работе «враздрай») создает момент, который разворачивает подводную лодку в сторону неработающего борта (работающего на меньших оборотах или на задний ход).
Рассмотренные выше силы и моменты, возникающие на вертикальном руле, гребных винтах, корпусе подводной лодки в процессе их сложного взаимодействия в различных условиях, по-разному влияют на управляемость подводной лодки. Каждый, кто управляет кораблем, должен знать, понимать и предвидеть характер воздействия этих сил и моментов, чтобы грамотно управлять кораблем.
Главные размерения подводной лодки (длина, ширина, осадка) и форма обводов подводной части корпуса. Чем больше отношение длины корабля к его ширине, тем больше диаметр его циркуляции. Следовательно, длинный корабль менее поворотлив, но обладает лучшей устойчивостью на курсе. Корабли, имеющие небольшую осадку и тупые обводы кормовой части, испытывают меньшее сопротивление воды при повороте и лучше разворачиваются при перекладке вертикального руля. Округлая форма бортов подводной части улучшает ее поворотливость.
Скорость хода и направление движения. Увеличение скорости хода подводной лодки приводит к повышению эффективности органов управления, что ведет к улучшению управляемости.
5) Крен и дифферент. При отсутствии крена давление встречной воды на скуле подводной лодки распределяется симметрично, а при наличии крена оно становится неравномерным по бортам. При плавании с креном подводная лодка имеет тенденцию уклоняться с курса в сторону повышенного борта, так как встречный поток воды оказывает большее давление на тот борт, который больше погружен в воду. Наличие дифферента на корму ухудшает поворотливость подводной лодки, а на нос улучшает ее, так как кормовая часть, имеющая меньшую осадку, будет лучше разворачиваться под действием переложенного вертикального руля.
6) Направление и сила ветра. Ветер вызывает дрейф, тем более заметный, чем меньше скорость хода. При боковом ветре подводная лодка стремится уклониться с курса «под ветер», и для ускорения поворота «на ветер» при значительной его силе рекомендуется уменьшить парусность носовой надстройки приемом воды в носовые цистерны главного балласта.
На переднем ходу заданный курс удерживается с помощью вертикального руля. При движении подводной лодки назад в свежую погоду удержать ее на заданном курсе рулем и машинами иногда невозможно. Подводные лодки с застопоренными машинами разворачиваются ветром и становятся по отношению к нему лагом. Это происходит вследствие того, что осадка носом обычно меньше осадки кормой, а парусность носовой надстройки больше кормовой.
7) Наличие и направление волнения. Направление действия волны, как правило, совпадает с направлением ветра, усиливая его действие на подводную лодку. При плавании против волны обводы носовой части лучше воспринимают сильные гидродинамические удары волн, винты и рули менее подвергаются ударам и подводная лодка сохраняет относительно хорошую управляемость. Плавая по волне, подводная лодка меньше подвергается воздействию встречных ударов волн, но при следовании небольшой скоростью кормовая надстройка подвергается значительному заливанию, винты временами оголяются, тем самым создаются ненормальные условия для работы двигателей.
При сильном волнении вследствие кренов и дифферентов происходит частичное заполнение цистерн главного балласта у бескингстонных подводных лодок, в результате этого увеличивается осадка, уменьшаются запас плавучести и остойчивость. Волнение вызывает качку, и для уменьшения вредного влияния ее на подводную лодку необходимо, используя диаграммы качки, выбирать благоприятные курс и скорость.
8) Наличие течения. В общем случае любое течение усложняет управление подводной лодкой, особенно при плавании в узкостях, при швартовке, отходах от пирсов и постановке на якорь и бочки. Боковые течения создают особенно неблагоприятные условия для управления подводной лодкой при осуществлении маневра швартовки к причалам и пирсам.
Характер глубин. При переходе подводной лодки с большой глубины на мелководье изменяется картина волнообразования и волнового сопротивления. Характер образования волн на мелководье зависит от отношения глубины места к осадке Н/Т и фактической скорости к критической V/  ; где g — ускорение силы тяжести 9,81 м/с2.
; где g — ускорение силы тяжести 9,81 м/с2.
При малых скоростях хода, когда V < (0,4— 0,5) и отношение Н/Т >7, волнообразование будет таким же, как и на глубокой воде. По мере увеличения скорости хода волнообразование изменяется, так как происходит наложение поперечных и расходящихся волн, которые сливаются в одну поперечную волну, расположенную вблизи форштевня. С появлением ее происходит всплытие носовой части и увеличение дифферента на корму. Движение подводной лодки с дифферентом приводит к увеличению лобового сопротивления.
При образовании этой волны происходит снижение уровня воды в кормовой части, в результате чего уменьшается расстояние между корпусом и грунтом. Это приводит к увеличению скорости потока воды, протекающей в этой области, а следовательно, и к снижению движения, что влечет за собой подсасывание кормовой части к грунту и при недостаточной глубине места может привести к касанию грунта.
9) Ограниченность водного пространства. При плавании в узких местах скорость подводной лодки относительно плавания на обширных акваториях значительно снижается. Это вызывается дополнительным сопротивлением, которое испытывает подводная лодка от волн, отраженных берегами.
Заключение.
В данной работе была разработана диалоговая программа для моделирования динамических процессов и оптимизации и на ее основе были получены данные в виде графиков, по которым мы исследовали систему управления подводным аппаратом в среде программирования РДС.
Также в последующемисследовании системы управления курсом подводного аппарата была проведена параметрическая оптимизация регуляторов в среде программирования РДС.
Далее были рассмотрены основные факторы влияющие на управляемость подводного аппарата (в данном случае подводной лодки) в водной среде. Отметим, что в настоящее время подводные лодки обладают достаточной устойчивостью движения по глубине, однако для поддержания заданной глубины погружения необходима периодическая перекладка горизонтальных рулей. Поворотливость в вертикальной плоскости также зависит в основном от действия горизонтальных рулей. Кроме того, на управляемость в вертикальной плоскости влияют гидродинамические характеристики корпуса подводной лодки, стабилизаторов, скорость хода и удифферентованность. На подводную лодку, двигающуюся в подводном положении, действуют статические и гидродинамические силы.
Поиск по сайту: