АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Статические и динамические характеристики элементов САР
1. Статические характеристики элементов САР
Статическая характеристика – зависимость выхода от входа в установившемся режиме.
Статическая характеристика может быть:
· Линейной
Характеризуется коэффициентом усиления
 [размерность];
[размерность];

 ;
;
 [безразмерный коэффициент];
[безразмерный коэффициент];
· Нелинейной
 [размерность];
[размерность];
Для определения коэффициента усиления проводят линеаризацию вокруг точки нормального режима эксплуатации.

2. Динамические характеристики
Это изменение выхода по времени в случае изменения входного сигнала. Входной сигнал пытаются изменить скачком (дискретно).
 ;
;
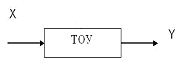
Под звеном понимается одинаковое математическое описание разных элементов или аппаратов.
Существуют следующие звенья:
1. Усилительное
2. Апериодическое
3. Интегрирующее
4. Дифференцирующее
5. Колебательное
В основном для описания аппарата используются звенья 1,2,5.
Дифференцирующее звено

Апереодическое звено
Уравнение апереодического звена.

T- постоянная времени; k-коэффициент усиления
Решение: 
T определяется проведением касательной к какой-либо точке экспоненты.
ПОГРЕШНОСТЬ ИЗМЕРЕНИЙ
Существуют два вида погрешностей:
1. Основные (погрешности, возникающие при нормальном режиме эксплуатации прибора (устройства));
2. Дополнительные (погрешности, возникающие при выходе из нормального режима эксплуатации прибора).
Основные погрешности:
1. Абсолютная погрешность
Абсолютная погрешность – это разность между измеренным и действительным значением. Абсолютная погрешность измеряется по образцовому прибору.
 ;
;
2. Относительная погрешность
Относительная погрешность – это отношение абсолютной погрешности к действительному значению, выраженное в процентах.
 ;
;
3. Приведенная погрешность
Приведенная погрешность – это отношение абсолютной погрешности к нормированному значению, выраженное в процентах.
В качестве нормированного значения можно использовать длину шкалы прибора  , либо максимальное значение
, либо максимальное значение 
Приведенная погрешность используется для определения класса точности прибора. Класс точности прибора – обобщенная характеристика.
Класс точности определяется по максимальному значению допустимой приведенной погрешности (он, как правило, указывается на приборе). Если на приборе указан класс точности 1.5, то это значит, что максимальное значение приведенной погрешности ±1.5%
Свойства объектов регулирования
1. Самовыравнивание;
2. Емкость;
3. Запаздывание;
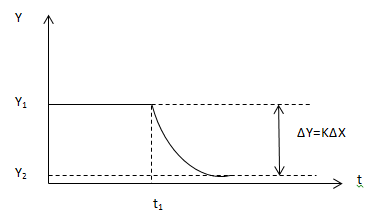
Самовыравнивание – это свойство объекта самостоятельно приходить в новое установившееся состояние при входном воздействии.
 Изменение уровня в аппарате в случае резкого изменения расхода по входу.
Изменение уровня в аппарате в случае резкого изменения расхода по входу.
Без самовыравнивания.

Е – емкость
Н – насос
Нас интересует, как будет меняться L в случае резкого увеличения хода.
Степень самовыравнивания:  .
.
Емкость – это то свойство объекта, которое характеризует инертность объекта.

 , dy/dt – скорость изменения выхода
, dy/dt – скорость изменения выхода
Большой емкостью обладают печи.
Запаздывание
τ  = t2 – t1; τ – функция длины
= t2 – t1; τ – функция длины

НЕКОТОРЫЕ ВОПРОСЫ ТЕОРИИ САР
1. Переходные процессы в САР
2. Понятие устойчивости САР
3. Показатели качества регулирования
Переходные процессы в САР
Переходный процесс – изменение регулирования параметра Y по времени в случае скачкообразного (резкого) изменения хода.
В системе регулирования возможны 2 входных воздействия:
1. Изменение задания изменения Y0
2. Изменение возмущения Z
Существуют два вида переходных процессов:
1. По заданию
2. По возмущению
Понятие устойчивости САР
Система считается устойчивой, если, будучи выведенной из состояния равновесия, она с течением времени придет в установившееся состояние. Понятие устойчивости САР сформулировал Ляпунов.
 Условие устойчивости – первое необходимое условие.
Условие устойчивости – первое необходимое условие.
Показатели качества регулирования
При создании САР после определения устойчивости системы регулирования определяют показатели качества регулирования (базируются, как правило, на понижении технического процесса).
К показателям качества регулирования:
1. Время регулирования
2. Динамическая ошибка
3. Систематическая ошибка
4. Степень затухания переходного процесса
Время регулирования
Считается, что переходный процесс закончен, когда параметр входит в трубку точности.
Время регулирования – это время от начала изменения параметра до первого момента вхождения параметра в трубку точности и невыхода из нее.
Динамическая ошибка – это максимальное отклонение параметра от задания, это первая максимальная амплитуда.
yдин = A1 = Amax
Статистическая ошибка – это отклонение параметра от задания в установившемся режиме.
Степень затухания переходного процесса
 , где A3 – вторая положительная амплитуда
, где A3 – вторая положительная амплитуда
При построении САР задается степень затухания для того, что бы получить определенный переходный процесс.
Как правило, ψ = 0,75÷0,9. в этом случае получают затухающий колебательный процесс.
Статистическая ошибка должна быть равна нулю – точное регулирования.
Динамическая ошибка должна быть минимальна.
Показатели качества регулирования определяются:
1. Свойствами объекта
2. Техническими средствами автоматизации
Менять показатель качества позволяет контроллер.
ДАТЧИК
Датчик предназначен для измерения параметра и для его преобразования в стандартный (унифицированный) сигнал.

|
Y – регулируемый параметр
Yст – регулируемый параметр, преобразованный в стандартный сигнал
Eст – электрический стандартный сигнал (0-5 мА, 4-20 мА, 0-10 V в зависимости от расстояния)
Рст – пневматический стандартный сигнал (0.02 – 0.1 МПа)
ИзПр – измерительный преобразователь
НПр – нормирующий преобразователь
В датчике измерительный преобразователь и нормирующий преобразователь компонуются в одном корпусе, однако возможно и их раздельное исполнение.
Измерительный преобразователь (чувствительный элемент) измеряет параметр и преобразует его в какой-то сигнал
Нормирующий преобразователь преобразует какой-либо сигнал в стандартный
КОНТРОЛЛЕР
Контроллер выполняет большое количество функций (до 90 алгоритмов), а автоматический регулятор – только один алгоритм.
Либо контроллер, либо автоматический регулятор выполняют задачу стабилизации параметра, т.е. поддержание параметра на заданном значении.
В системе автоматического регулирования всегда должна присутствовать отрицательная обратная связь.
Контролер:
1. Сравнивает Y c Y0
2. Если есть отклонение параметра от задания, то контроллер вырабатывает регулирующее воздействие (Xр), направленные на ликвидацию данного рассогласования.
ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО
Исполнительное устройство состоит из привода и регулирующего органа. На исполнительное устройство поступает регулирующее воздействие, вырабатываемое контроллером. Это стандартный электрический сигнал. Если привод пневматический, то после контроллера необходимо установит электропневмопреобразователь.
Поиск по сайту: