АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Построение положений рычажных механизмов методом засечек
Кинематический анализ механизмов выполняется в порядке
присоединения структурных групп.
Построение положений плоских механизмов второго класса обычно выполняется методом засечек. В качестве примера рассмотрим кривошипно-ползунный механизм (рис.3.1).
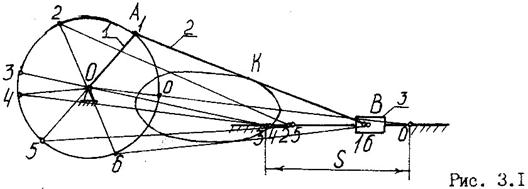
Вначале находим крайние положения механизма (0 и 3), в которых кривошип 1 и шатун 2 располагаются на одной прямой. Для этого из центра 0 делаем засечки радиусами АВ + ОА и АB - ОА на линии движения ползуна 3. Далее делим окружность, описываемую точкой А, на равные части (например, на шесть) и отмечаем последовательные положения точки А – 0, 1, 2, 3, 4, 5, 6, а затем методом засечек на линии движения ползуна получаем последовательные положения точки В – 0, 1, 2, 3 (движение справа налево) 4, 5, 6 (движение слева направо). S - ход ползуна. В результате получаем последовательные положения всех звеньев механизма.
Траектория некоторой точки К шатуна получается, если все последовательные положения точки соединить плавной кривой.
3.3. Определение скоростей и ускорений рычажных механизмов методом планов
Пример. Кривошипно-ползунный механизм (рис. 3.2).
Дано:  = 60 рад/с или
= 60 рад/с или  = 50 об/мин.
= 50 об/мин.  = 100 мм,
= 100 мм,  = 300 мм,
= 300 мм,  =5 рад/с2.
=5 рад/с2.
Формула строения:  механизм второго класса.
механизм второго класса.
Построение плана скоростей. Скорость точки А начального звена равна

где –частота вращения кривошипа 1 в об/мин.
 в сторону . Выбираем масштабный коэффициент скоростей
в сторону . Выбираем масштабный коэффициент скоростей  и определяем отрезок
и определяем отрезок  , мм, изображающий
, мм, изображающий  . Точка Р – полос плана скоростей.
. Точка Р – полос плана скоростей.
Рассматриваем структурную группу (2, 3). Для определения скорости точки B составляем векторное уравнение согласно теореме о плоскопараллельном движении:
 (3.1)
(3.1)
 где
где  – скорость точки В во вращательном движении звена 2 относительно точки А,
– скорость точки В во вращательном движении звена 2 относительно точки А,  ,
, 
Уравнение 3.1 решаем графически. Для этого из полюса Р откладываем отрезок pa. в направлении вектора  , из точки a проводим прямую в направлении вектора
, из точки a проводим прямую в направлении вектора  , т.е.
, т.е.  , затем из полюса Р проводим прямую в направлении суммарного вектора
, затем из полюса Р проводим прямую в направлении суммарного вектора  , т.е.
, т.е.  Пересечение указанных направлений дает точку в. В результате находим
Пересечение указанных направлений дает точку в. В результате находим

Для определения направления угловой скорости  шатуна 2 переносим вектор относительной скорости (отрезок
шатуна 2 переносим вектор относительной скорости (отрезок  )в точку В и наблюдаем, в какую сторону он поворачивает звено 2
)в точку В и наблюдаем, в какую сторону он поворачивает звено 2
относительно точки А,
Скорость точки К шатуна находим на основании векторных уравнений
 и
и 
где  и
и  –относительные скорости, причем
–относительные скорости, причем  ,
,  .В результате получим
.В результате получим

Отметим основные свойства планов скоростей.
1. Векторы абсолютных скоростей начинаются в полюсе плана.
2. Векторы относительных скоростей соединяют концы векторов абсолютных скоростей, причем вектор на плане направлен к той точке, которая стоит первой в индексе, например, - от а к в.
3. Теорема подобия. Отрезки относительных скоростей точек, принадлежащих одному звену, образуют фигуру, подобную соответствующей фигуре звена и сходственно с нею расположенную. Сходственное расположение означает, что направления обхода одноименных контуров совпадают (например, а-в-ки А-В-К – по часовой стрелке). В рассмотренном примере  ~
~  .
.
Построение плана ускорений. Ускорение точки А начального звена

где  –нормальное ускорение;
–нормальное ускорение;
 – касательное (тангенциальное) ускорение.
– касательное (тангенциальное) ускорение.

причем вектор направлен вдоль ОА от А к 0, a  в сторону .
в сторону .
Выбираем масштабный коэффициент ускорений  , и определяем отрезок
, и определяем отрезок  мм, изображающий
мм, изображающий  , и отрезок
, и отрезок  мм, изображающий
мм, изображающий  . Точка
. Точка  - полюс плана ускорений. Откладываем отрезки
- полюс плана ускорений. Откладываем отрезки  и
и  в соответствии с их направлениями. Тогда
в соответствии с их направлениями. Тогда

Рассматриваем структурную группу (2, 3). Для определения ускорения точки В составляем векторное уравнение согласно теореме о плоскопараллельном движении:
 (3.2)
(3.2)
где  –нормальная и касательная составляющие ускорения
–нормальная и касательная составляющие ускорения  точки В во вращательном движении звена 2 относительно точки А, причем вектор
точки В во вращательном движении звена 2 относительно точки А, причем вектор  направлен вдоль АВ от В к А, а
направлен вдоль АВ от В к А, а  . Нормальная составляющая находится также по величине
. Нормальная составляющая находится также по величине
Отрезок, изображающий равен

Уравнение (З.2) решаем графически. Для этого из точки a откладываем отрезок  в направлении вектора из точки
в направлении вектора из точки  проводим прямую в направлении вектора
проводим прямую в направлении вектора  , а из полюса проводим прямую в направлении суммарного вектора
, а из полюса проводим прямую в направлении суммарного вектора  , т.е.
, т.е.  . Пересечение указанных направлений дает точку в. В результате находим
. Пересечение указанных направлений дает точку в. В результате находим

Для определения направления углового ускорения  шатуна 2 переносим вектор касательного ускорения (отрезок
шатуна 2 переносим вектор касательного ускорения (отрезок  ) точку В и наблюдаем, в какую сторону он поворачивает звено 2 относительно точки А.
) точку В и наблюдаем, в какую сторону он поворачивает звено 2 относительно точки А.
Ускорение точки К находим на основании теоремы подобия, которая справедлива и для плана ускорений. Для этого методом засечек строим , подобный и сходственно с ним расположенный. Стороны  и
и  находим из пропорций
находим из пропорций
откуда
В результате получим
 .
.
Основные свойства планов ускорений такие же, как и планов скоростей.
Поиск по сайту: