АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Поляризованные электромагнитные системы
Поляризованные электромагнитные системы отличаются от рассмотренных выше наличием двух не зависящих друг от друга магнитных потоков: постоянного, не зависящего от состояния схемы, в которую включен механизм, и переменного, зависящего от состояния схемы, в которую включен механизм. Первый, поляризующий, поток Фп создается либо постоянным магнитом (рис. 5-13, а), либо электромагнитом с независимым питанием. Второй, рабочий, поток
ФЭ создается электромагнитом. Значение и направление рабочего потока зависят от состояния схемы, в которую включен механизм.
Принцип действия. Образованный магнитом 3 поляризующий поток Фп, пройдя через якорь 2, разветвляется. Одна его часть ФП1 проходит через зазор  1: и левую часть сердечника 1. Вторая его часть ФП2 проходит через зазор
1: и левую часть сердечника 1. Вторая его часть ФП2 проходит через зазор  2 и
2 и
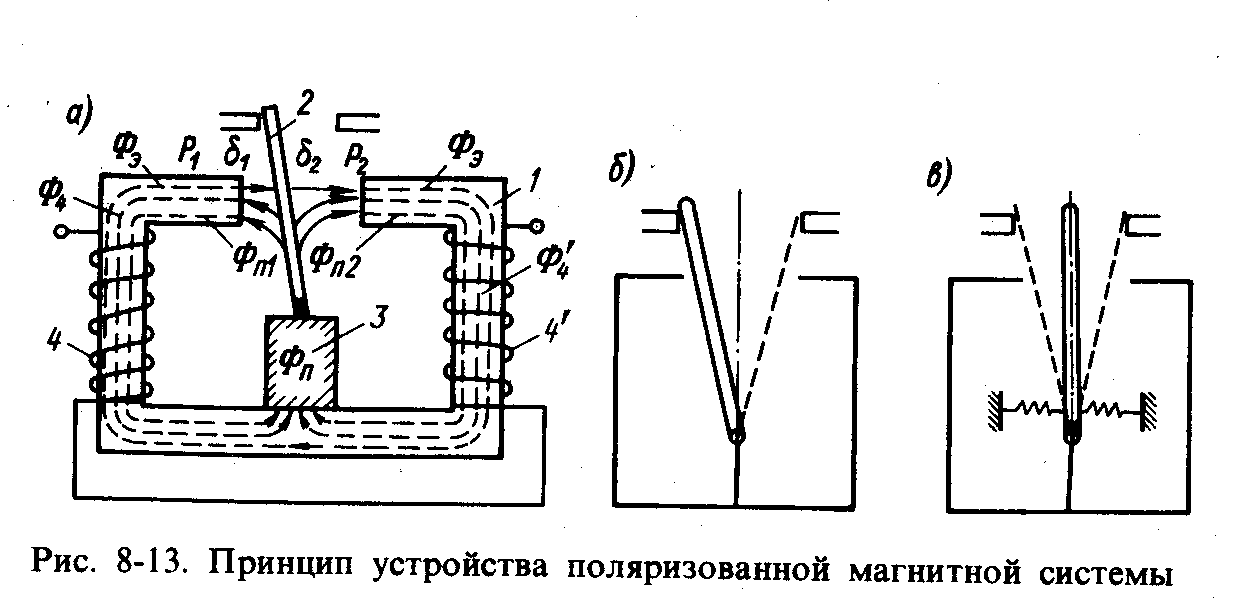
Рис. 5-13. Принцип устройства поляризованной магнитной системы
правую часть сердечника. Катушками 4 и 4', надетыми на сердечник и включенными согласно, создается рабочий поток. Основная его часть Фэ замыкается через весь воздушный зазор  1: + 2 и сердечник, охватывая обе катушки. Меньшие части этого потока Ф4 и Ф
1: + 2 и сердечник, охватывая обе катушки. Меньшие части этого потока Ф4 и Ф  4 замыкаются через якорь, соответствующий воздушный зазор и часть сердечника, охватывая только одну катушку.
4 замыкаются через якорь, соответствующий воздушный зазор и часть сердечника, охватывая только одну катушку.
При наличии только одного поляризующего потока якорь отклонится к одному из полюсов магнита, так как с уменьшением зазора (в нашем примере 1) часть поляризующего потока в этом зазоре увеличится за счет уменьшения его доли в другом зазоре. При появлении рабочего потока в одном из зазоров будем иметь разность потоков, а в другом — сумму. В нашем примере в зазоре 1 — поток ФП1 — Фэ — Ф4, в зазоре 2 — поток Фп2 + Фэ + Ф4. По мере увеличения рабочего потока поток в зазоре 1 будет все уменьшаться, а в зазоре 2 — увеличиваться. При каком-то соотношении потоков якорь перекинется на правую сторону, т. е. система сработает.
Для возврата системы в исходное положение нужно изменить полярность тока (а, следовательно, и потока) в рабочих катушках. Можно настроить систему так, что якорь вернется в исходное положение при снижении рабочего потока и сохранении его полярности. Для этого необходимо, чтобы, перекинувшись вправо, якорь не переходил через нейтральное положение (рис. 5-13, б), т. е. чтобы при любом положении якоря один и тот же воздушный зазор оставался меньше другого (например, 1 < 2). Такая настройка называется настройкой на преобладание. В магнитной системе (рис. 5-13, в) якорь в зависимости от полярности тока в рабочей катушке может отклоняться в ту или другую сторону. При обесточенной катушке якорь вернется в нейтральное положение.
Расчет тяговых сил. Считаем, что индукция распределена в зазорах равномерно, и расчет будем вести, используя формулу Максвелла. Силы, действующие на якорь в зазорах 1 и 2 от всех потоков, обозначим соответственно P1 и Р2.
При наличии только поляризующего потока
P1 =  ; P2 =
; P2 =  . (5.58)
. (5.58)
Суммарная сила, действующая на якорь,
P = P1 - P2 =  . (5.59)
. (5.59)
Учитывая, что Фп1 + Фп2 = Фп можем написать
 =
=  ; Фп1 =
; Фп1 =  ;; Фп2 =
;; Фп2 =  (5-60)
(5-60)
Тогда
P = P1 - P2 =  . (5.61)
. (5.61)
т. е. суммарная сила, действующая на якорь, пропорциональна смещению якоря от нейтрали [( 2 — 1)/2 — смещение] и зависит от потока постоянного магнита.
При наличии рабочего потока
P1 =  ; P2 =
; P2 =  . (5.62)
. (5.62)
Потоками Ф4 и Ф'4 можем пренебречь, так как постоянный магнит представляет для них большое сопротивление и они малы по сравнению с другими потоками. Тогда
P1 =  ; P2 =
; P2 =  . (5.63)
. (5.63)
(8-63)
Нас интересует значение потока Фэ, при котором якорь начнет перемещаться. Это будет при условии, когда Р1 = Р2, т. е.
= . (5.64)
Откуда
ФЭ =  (ФП1 - ФП2). (5.65)
(ФП1 - ФП2). (5.65)
Если пренебречь потерями в стали сердечника и потоками рассеяния, то минимальная МДС Fmin, при которой якорь придет в движение, будет
FЭ min =  . (5.66)
. (5.66)
Подставляя значения Фп1 и Фп2 согласно выражению (8-3)v получим
FЭ min = ФП  . (5-67)
. (5-67)
т. е. минимальная МДС рабочих катушек, необходимая для срабатывания системы, пропорциональна поляризующему потоку и смещению якоря от нейтрали.
Формы магнитных систем. По источнику МДС поляризующего поля различают систему с постоянным магнитом и системы с электромагнитом, питаемым от независимого источника.
По конструкции различают системы с последовательной магнитной цепью, с параллельной, или дифференциальной, магнитной цепью и с мостовой магнитной цепью. В мостовой магнитной цепи якорь остается в нейтральном положении при отсутствии тока в рабочих обмотках.
Область применения. Поляризованные системы находят широкое применение в установках проводной связи, а также в устройствах электросиловой автоматики, релейной защиты, в следящих системах, системах телеуправления, железнодорожной сигнализации и блокировки. Особенностями этих систем являются направленность действия, высокая чувствительность, большая кратность термической стойкости, быстродействие.
ЛЕКЦИЯ № 17
6.1. Предохранители низкого напряжения
6.1.1. Назначение, принцип действия и устройство предохранителя;
физические явления в электрическом аппарате.
6.1.2. Параметры предохранителя.
6.1.3. Конструкция предохранителей.
6.1.4. Предохранители с гашением дуги в закрытом объёме.
6.1.5. Предохранители с мелкозернистым наполнителем (серии ПН-2, ПРС).
6.1.6. Предохранители с жидкометаллическим контактом.
6.1.7. Быстродействующие предохранители для защиты полупроводниковых
приборов.
6.1.8. Предохранитель - выключатель.
6.1.9. Выбор, применение и эксплуатация предохранителя для защиты
электродвигателя и полупроводниковых устройств.
Поиск по сайту: