АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Методичні поради. Схема автоматичного керування електродвигунів приведена на рис
Схема автоматичного керування електродвигунів приведена на рис. 7.1.
При дослідженні процесів пуску, реверсування і гальмування електродвигуна основними залежними величинами від часу являються:  і
і  , які характеризують швидкість протікання перехідних процесів і їх енергетичну сторону:
, які характеризують швидкість протікання перехідних процесів і їх енергетичну сторону:
а) для визначення і побудови залежності використовують рівняння
 ; (7.1)
; (7.1)
де n - біжуче значення швидкості двигуна, об/хв;
ny - усталена швидкість обертання двигуна в даному режимі роботи, nпоч - початкова швидкість обертання для даної ступені пускового реостату в момент переключення;
e - основа натурального логарифму;
TM - електромеханічна постійна часу машини;
 (с); (7.2)
(с); (7.2)
GD2 - маховий момент двигуна і обертової частини робочої машини;
ΣRяк - сума опорів у колі якоря;
t - час перехідного процесу, с.
В рівнянні (7.1) час t має змінне значення і змінюється у границях
 .
.
б) для визначення і побудови залежності використовують рівняння:
 ; (7.3)
; (7.3)
де I - біжуче значення струму в колі якоря;
Iпоч - початкове значення у початковий час перехідного процесу;
Iс - струм, який визначається навантаженням двигуна.
в) При переключенні двигуна в режим гальмування противмиканням у коло якоря вводять додатковий опір противмикання, який визначається рівнянням:
 ; (7.4)
; (7.4)
де Uн - номінальна напруга двигуна;
сe - конструктивна постійна машини,  ;
;
ωmax - максимальна швидкість обертання у момент перемикання;
ITmax - максимальний допустимий струм при противмиканні.
г) Процес динамічного гальмування характеризується зміною у часі швидкості обертання і струму в колі якоря, які можуть бути визначені рівняннями:
 ; (7.5)
; (7.5)
 ; (7.6)
; (7.6)
 - перепад швидкостей, який визначається по характеристиці динамічного гальмування моментом навантаження МС, рис. 7.3.
- перепад швидкостей, який визначається по характеристиці динамічного гальмування моментом навантаження МС, рис. 7.3.
Для проведення досліджень користуємось схемою автоматичного керування електроприводом (рис. 7.2). Додаткові опори (R1, R2, R3)в колі обмотки якоря, забезпечують зміну швидкості якоря при достатньому моменті на валу (рис. 7.1).
Вимірювання швидкості електродвигуна проводимо за допомогою тахогенератора, який жорстко зв'язаний з валом дослідного двигуна.
Регулювання вставок реле прискорення контролюється електричним секундоміром, при цьому слід враховувати тепловий режим котушок.
Наладку реле противмикання на напругу втягування виконуємо за допомогою потенціометра.
Для плавного регулювання рекомендується послідовно з обмоткою реле ввімкнути реостат, опір якого приблизно рівний 0,25...0,3 опору котушки. При наладці реле слід врахувати перегрів його обмотки. Струм спрацьовування максимального реле повинен бути вище максимального допустимого під час пуску і гальмування приблизно на 15-20%. При наладці реле допустимого струму можна зашунтувати його котушку рубильником,
|
|
|
|
|
|
|
 Рис. 7.1. Механічні характеристики роботи електродвигуна постійного струму з незалежним збудженням з додатковими опорами в колі якоря
Рис. 7.1. Механічні характеристики роботи електродвигуна постійного струму з незалежним збудженням з додатковими опорами в колі якоря
|
Запис струму проводимо використовуючи шунт, включений в коло якоря, спад напруги на ньому подаємо на осцилограф. Напруга на тахогенераторі пропорційна швидкості обертання якоря, її подаємо на розділювач напруги, а від нього напругу на осцилограф.
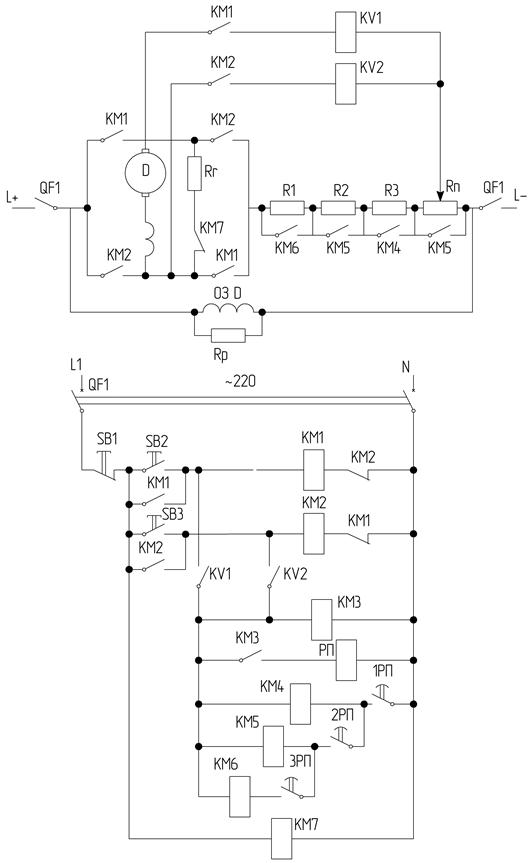
Рис. 7.2. Схема експериментальної установки
Поиск по сайту: