АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Технические данные привода
1. Диаметр цилиндра, мм -58;
2. Ход поршня, мм -40;
3. Номинальное давление, кгс/см2 -5,0;
4. Минимальное давление срабатывания, кГс/см2 -3,75.
Общий вид кулачкового вала представлен на рис.45.
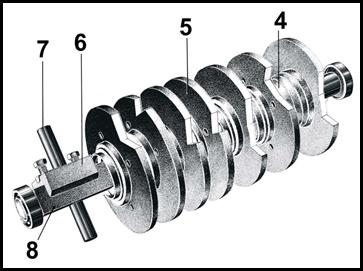
Рис. 45 Кулачковый вал двухпозиционного группового аппарата
2.14 Групповые переключатели
Групповыми переключателями, в зависимости от функций, которые они выполняют (например, изменение направления тока в обмотке якоря ТЭД) называют аппараты, состоящие из групп силовых контакторных элементов, которые переключаются от воздействия профилированных шайб (5), насаженных на один вал (рис.45), приводимый во вращение общим приводом.
В зависимости от числа позиций, переключаемых приводом, групповые переключатели имеют электропневматические, электродвигательные или ручные приводы.
Двухпозиционные переключатели (реверсор и переключатель положений), имеют электропневматический привод; многопозиционный переключатель (реостатный контроллер) имеет электродвигательный привод, а многопозиционный переключатель (контроллер машиниста) – ручной привод.
Групповые переключатели, как и индивидуальные, имеют контакторные элементы, включенные в цепи управления и переключаются, также как и силовые от воздействия профилированных шайб, насаженных на общий вал.
Групповыми переключателями с электропневматическим приводом управляют при помощи электромагнитных вентилей включающего типа. На схемах электропневматический привод (рис.44) обозначается двумя катушками электромагнитных вентилей, впускающих сжатый воздух в цилиндр привода при возбуждении катушки, а при обесточенной катушке соединяет этот цилиндр с атмосферой. От этого зависит положение кулачкового вала аппарата, а следовательно и кулачкового контактора в схеме.
Групповые многопозиционные переключатели с электродвигательным приводом управляются при помощи малогабаритного электродвигателя постоянного тока типа ПЛ-072; на схеме обозначается СДРК.
Вал кулачкового барабана для групповых контакторов (рис.45) выполнен из стали. На среднюю часть вала имеющего квадратное сечение, насажены кулачковые шайбы (5) прессованные из пластмассы. Шайбы имеют специальный профиль (впадины и выступы) и установлены на валу в таком порядке, что обеспечивают размыкание и замыкание кулачковых элементов группового переключателя цепей силовой и управления в определенной последовательности, согласно диаграмме замыкания кулачковых элементов.
Диаграмма замыкания кулачковых контакторов РК представлена на рис.123.
2.14.1 Реостатный контроллер ЭКГ–39Б
Реостатный контроллер предназначен для последовательного выведения из цепи ТЭД элементов пуско–тормозных резисторов в процессе пуска и электрического реостатного торможения, а также для ослабления магнитного поля ТЭД.
Общий вид аппарата представлен на рис.46, его электромонтажная схема представлена на рис.47.
Аппарат кулачкового типа, многопозиционный. На ХОД имеет 36 позиций, на ТОРМОЗ – 18 позиций. Вращение вала РК происходит в обе стороны: с 1-й по 18-ю позиции – в прямом направлении, с 18-й(19) по 1-ю(36) позиции – в обратном направлении.
Реостатный контроллер смонтирован на раме, состоящей из трех силуминовых боковин (1,4,11) закрепленных на двух металлических угольниках (10). В двух крайних боковинах установлены подшипники, в которых вращается кулачковый вал с профилированными шайбами (6). С обеих сторон вала к боковинам крепятся рейки (3) с установленными на них кулачковыми элементами (2) типа КЭ–47 силовой цепи и кулачковыми элементами (5) типа ЭУ5 цепи управления.
Кулачковый вал РК приводится во вращение электродвигателем (13) типа ПЛ–072Г (СДРК–серводвигатель РК). Усилие от двигателя на кулачковый вал передается через двухступенчатый редуктор. Первая ступень червячная (12) с передаточным числом 25, вторая ступень зубчатая (9) с передаточным числом 1,74. Общее передаточное число редуктора 25×1,74=43,5.
Вал редуктора соединен с валом СДРК полумуфтой. При работе электродвигателя СДРК кулачковый барабан (6) вращается и его профилированные шайбы воздействуют на ролики кулачковых элементов, контакты которых при этом замыкаются или размыкаются согласно развертке (диаграмме включения) и производят переключения в силовой цепи и в цепи управления.
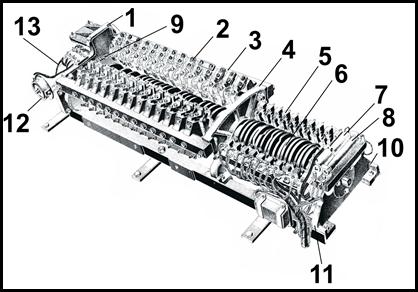
Рис. 46 Реостатный контроллер ЭКГ-39Б
Скорость вращения вала РК регулируется резистором (7,8), включенным параллельно якорю СДРК (рис.131). Изменение направления вращения вала РК происходит путем изменения контактами реле реверсировки РР, направления тока в обмотке возбуждения СДРК. Остановить вал РК на позиции возможно путем замыкания обмотки якоря СДРК накоротко.
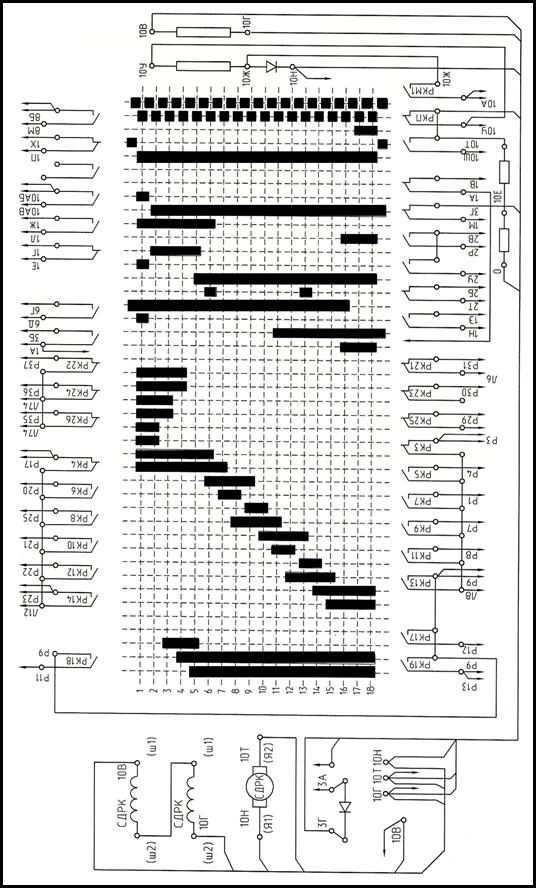
На схеме управления цифрами обозначены КЭ РК, которые показывают, на каких позициях РК данный КЭ замкнут.
Например: РК1–6–контакты КЭ замкнуты с 1-й по 6-ю позиции, а разомкнуты с 7-ой по 18-ю позиции РК.
Исходное положение РК–1-я позиция.
Технические данные ЭКГ–39Б:
1. Номинальное напряжение силовой цепи, В -750;
2. Номинальное напряжение цепи управления, В -75;
3. Угол поворота кулачкового барабана
на одну позицию, град. -19;
4. Число позиций -18;
5. Хронометрическое время вращения вала
в одну сторону, сек. -2,8-3,2;
6. Масса, кг - -253.
| Рис.47 Электроонтажная схема реостатного контроллера ЭКГ-39Б |
Поиск по сайту: