АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Министерство образования и науки Российской Федерации 2 страница

 . (6.8)
. (6.8)
Як відомо з дисципліни ТАУ, КЧХ реального П-регулятора визначається з його передатної функції шляхом заміни в ній оператора Лапласа s на jω і запису КЧХ або в декартовій системі координат у вигляді суми дійсної Re РП(ω) та уявної Im РП(ω) складових, або в радіальній системі координат у вигляді модуля (довжини) MРП(ω) та з аргумента (кута повороту) θРП(ω) вектора годографа:
 ,
,
де 
КЧХ ідеальної П-ланки зображується у вигляді точки на відстані КР на дійсній осі графіка КЧХ (рисунок 3.8,а) для всього діапазону частот вхідного сигналу –∞ < ω < +∞:

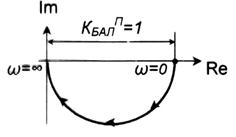
КЧХ інерційної ланки першого порядку (баластної ланки реального П-регулятора) зображена на рисунку 6.8,б. При ω = 0 її годограф починається на дійсній осі графіка КЧХ в точці з одиничним значенням коефіцієнта передачі, а із збільшенням частоти вхідного сигналу ω → ∞ модуль її вектора MРП (коефіцієнт передачі ланки) зменшується від початкового значення до нуля, її аргумент θРП (кут зміщення між фазами вхідного і вихідного сигналів) збільшується від 0 до 90º. Форма годографа – півколо.
 .
.
 .
.

а) б)
Рисунок 6.8 – КЧХ складових реального П-регулятора
а – ідеального П-регулятора, б – баластної ланки
На рисунку 6.9,а зображена КЧХ реального П-регулятора, що представляє собою промасштабовану в KP раз КЧХ баластної ланки. По КЧХ можна знайти граничне значення частоти вхідного сигналу, при якій виконуються умови (6.8) роботи П-регулятора в ОНР. При дозволених значення частоти вхідного сигналу ОНР П-регулятора цілком визначається параметром налаштування П-регулятора KP (рисунок 6.9,б).

а) б)
Рисунок 6.9 – КЧХ (а) та ОНР (б) реального П-регулятора
б) без охоплення ВМ постійної швидкості зворотним зв’язком
Оскільки виконавчий механізм в цьому випадку не охоплюється зворотним зв’язком, то П-регулятор побудований по комбіноваму методу корекції: перша частина регулятора (КПП) побудована за методом паралельної корекції, тобто використовує властивості граничної системи, а ВМ постійної швидкості включений послідовно з нею (рисунок 6.10).

Рисунок 6.10 – Структурна схема П-регулятора за варіантом б)
Проаналізуємо властивості такого П-регулятора за стандартною схемою:
1. Визначимо передатну функцію ланки зворотного зв’язку для формування даною структурою П-закону регулювання, для чого запишемо еквівалентну передатну функцію з’єднання ланок за схемою, зображеною на рисунку 6.8, і прирівняємо її до передатної функції ідеального П-регулятора:
 ,
,
Поділимо чисельник і знаменник виразу на K 1:
 .
.
Враховуючи, що в граничній системі при K 1→∞ вiдношення 1/ K 1→0, то рівняння граничної системи має вигляд
 , при K 1→∞.
, при K 1→∞.
Передатна функція ланки зворотного зв’язку має вираз
 .
.
Таким чином, для структури, в якій зворотний зв’язок (ЗЗ) охоплює лише операційний підсилювач, ланка ЗЗ повинна мати властивості інтегральної ланки, враховуючи тим самим інтегральні властивості і параметри ВМ (KВМ, ТВМ).
2. Дослідимо властивості реального регулятора для випадку, коли коефіцієнт передачі ОП є кінцевим числом,тобто K 1 ≠ ∞.
Еквівалентна передатна функція з’єднання ланок (рисунок 6.10) має вигляд:
 .
.
Скоротимо чисельник і знаменник на ТВМ ∙ s, потім поділимо на K 1∙ KВМ:
 .
.
З’єднання ланок в даній граничній системі, що має властивості П-регулятора, може бути представлене у вигляді послідовного з’єднання двох умовних ланок: ланки з передатною функцією ідеального П-регулятора WІДП(s) та баластної ланки WБАЛП(s), що спотворює ідеальний П-закон регулювання, і властивості якої визначимо далі.
3. Визначимо властивості баластної ланки реального П-регулятора.
Передатна функція ідеального П-регулятора
 .
.
Передатна функція баластної ланки П-регулятора є інерційною ланкою першого порядка з коефіцієнтом передачі  :
:
 при
при 
де  при
при  – постійна часу баластної ланки.
– постійна часу баластної ланки.
Т.ч. баластна ланка реального П-регулятора, як і в попередньому випадку реалізації регулятора, є інерційною ланкою першого порядку з одиничним коефіцієнтом передачі, постійна часу якої наближається до нуля в граничній системі, тобто при К 1→ ∞ вона перетворюється в П-ланку і не спотворює закон регулювання.
Всі висновки з властивостей баластної ланки, КЧХ і ОНР, що наведені вище для випадку реалізації П-регулятора з охопленням ВМ постійної швидкості ЗЗ за схемою а) вірні і для випадку реалізації П-регулятора без охоплення ВМ ЗЗ за схемою б), тому їх потрібно наводити при аналізі властивостей даної баластної ланки в повному обсязі.
6.4 Реалізація ПІ-закону регулювання АР з ВМ постійної швидкості
а) з охопленням ВМ постійної швидкості зворотним зв’язком

Рисунок 6.10 – Структурна схема ПІ-регулятора з охопленням ВМ ЗЗ
1-й крок: визначимо тип ланки ЗЗ в ідеальному ПІ-регуляторі, для чого використаємо рівняння граничної системи:
 .
.
Т.ч. знаходимо, що для формування ПІ-закону потрібно встановити у ЗЗ реальну диференційну ланку першого порядку (оператор Лапласа s в чисельнику і знаменнику) з постыйною часу Т 1.
2-й крок: визначимо властивості такого реального регулятора, для чого запишемо еквівалентну передатну функцію за рисунком 6.10:

3-й крок: виділимо у виразі для WЕКВ (s) передатні функції ідеального ПІ-регулятора і його баластної ланки, для чого знаменник дробу приведемо до загального знаменника і скоротимо на s:

Поділимо чисельник і знаменник виразу на комплекс (ТВМ + K 1 ∙KВМ∙KЗЗ∙Т 1) і перегрупуємо рівніння таким чином, щоб виділити структуру, подібну до структури передатної функції ідеального ПІ-регулятора
 ,
,
Т.ч. реальний ПІ-регулятор можна представити, як послідовне з’єднання ідеального ПІ-регулятора і баластної ланки, тобто реальний ПІ-регулятор формує наближений регулювання.
4-й крок: дослідимо властивості реального ПІ-регулятора:
1)  , де
, де  .
.
Параметри налаштування ПІ-регулятора КР і ТИ не є взаємозв’язаними, і визначаються лише параметрами ланки зворотного зв’язку.
2) Властивості баластної ланки:
 при
при  .
.
Висновок: баластна ланка – інерційна ланка першого порядку.
3) коефіцієнт передачі баластної ланки в граничній системі наближається до 1
 при
при  .
.
В реальному регуляторі, де K 1 – кінцеве число,  залежить від параметрів ВМ, від якості операційного підсилювача і від параметрів налаштування АР:
залежить від параметрів ВМ, від якості операційного підсилювача і від параметрів налаштування АР:
 .
.
4) постійна часу баластної ланки в граничній системі наближається до 0.
 ,
,
тобто баластна ланка вироджується в пропорційну ланку з одиничним коефіцієнтом передачі і не спотворює закон регулювання.
1) в реальному регуляторі постійна часу баластної ланки залежить від всіх параметрів, що входять в формулу



а) б)
Рисунок 6.11 – Криві розгону (а) і ОНР реального ПІ-регулятора (б)
б) без охопленням ВМ постійної швидкості зворотним зв’язком

Рисунок 6.12 – Структурна схема АР без охоплення ВМ ЗЗ
1-й крок: визначимо передатну функцію ланки ЗЗ в ідеальному ПІ-регуляторі.
Оскільки ВМ має інтегральні властивості, і КПП включений послідовно з ним, то згідно з методом послідовної корекції, для формування ПІ-закону регулювання даною еквівалентною системою необхідно:
– для формування П-складової нейтралізувати інтегральні властивості ВМ диференційною ланкою;
– для формування І-складової потрібно лише промасштабувати інтегральні властивості ВМ П-ланкою.
Т.ч., КПП повинен формувати ПД-закон.
В граничній системі закон регулювання визначається в ланці ЗЗ, тому з рівняння нашої граничної системи можна записати:
 .
.
2-й крок: визначимо еквівалентну передатну функцію структури для реального регулятора:

3-й крок: виділимо у виразі для WЕКВ (s) передатні функції ідеального ПІ-регулятора і його баластної ланки, для чого поділимо чисельник і знаменник на комплекс  , виділимо структуру передатної функції ПІ-регулятора:
, виділимо структуру передатної функції ПІ-регулятора:

4-й крок: дослідимо властивості реального ПІ-регулятора:
Передатна функція ідеального ПІ-регулятора:
1.  .
.
Висновки:
а) як і в попередньому випадку, постійна часу інтегрування (часу ізодрому) ТИ повністю визначається величиною постійної часу ланки ЗЗ Т 1.
б) З виразу для коефіцієнта передачі регулятора КР видно, що параметри налагодження КР і ТИ взаємозв’язані:
 .
.
в)  – коефіцієнт передачі регулятора залежить: від коефіцієнта передачі ланки ЗЗ КЗЗ, параметрів ВМ (КВМ і ТВМ) і параметрів налаштування ТИ.
– коефіцієнт передачі регулятора залежить: від коефіцієнта передачі ланки ЗЗ КЗЗ, параметрів ВМ (КВМ і ТВМ) і параметрів налаштування ТИ.
2. В граничній системі при баластна ланка також є інерційною ланкою першого порядку:
 .
.
Властивості баластної ланки в граничній системі:
а) коефіцієнт передачі баластної ланки наближається до 1:
 .
.
б) Постійна часу баластної ланки наближається до 0, тобто в граничній системі баластна ланка стає П-ланкою з одиничним коефіцієнтом передачі і не спотворює закон регулювання:
 .
.
в) В реальному регуляторі при K 1=const параметри баластної ланки  залежать від параметрів налаштування автоматичного регулятора KP і ТИ, виконавчого механізму KВМ, ТВМ і якості операційного підсилювача K 1:
залежать від параметрів налаштування автоматичного регулятора KP і ТИ, виконавчого механізму KВМ, ТВМ і якості операційного підсилювача K 1:


Криві розгону (а) і ОНР даного ПІ-регулятора (б) аналогічні попередньому випадку (рисунок 6.13):


а) б)
Рисунок 6.13 – Крива розгону і ОНР ПІ-регулятора
6.5 Реалізація лінійного ПІД-закону регулювання
а) з охопленням зворотнім зв’язком ВМ постійної швидкості:

Рисунок 6.14 – Структурна схема ПІД-регулятора з охопленням ВМ ЗЗ
В лінійних законах регулювання використовуються лінійні математичні операції: множення, ділення, додавання, інтегрування, диференціювання.
К 1 – операційний підсилювач (його наявність приводить до утворення граничної системи, якщо ЗЗ негативний).
Оскільки в прямому ланцюзі знаходиться ОП, що охоплений негативним ЗЗ, то в граничній системі ПІД-закон регулювання формується в ланці ЗЗ. Тому:
1-й крок: визначимо передатну функцію ланцюга ЗЗ, що формує ПІД-закон:
 | |||
 | |||




 |
Тут Т1 і Т2 – це постійні часу ланок ЗЗ.
2-й крок: визначимо еквівалентну передатну функцію структури для реального регулятора:
 .
.
3-й крок: виділимо у виразі для WЕКВ (s) передатні функції ідеального ПІД-регулятора і його баластної ланки, для чого поділимо чисельник і знаменник на комплекс  і приведемо вираз до загального знаменника:
і приведемо вираз до загального знаменника:
 .
.
виділимо передатні функції ПІД-регулятора і баластної ланки:


4-й крок: проаналізуємо властивості реального ПІД-регулятора при K 1 = const.
1. Якщо позначити Т1+Т2 через параметр налаштування ТИ, то одержимо передатну функцію ідеального ПІД-регулятора:
 ,
,
 ,
,  ,
,
Висновок 1: параметри налаштування ТД, ТИ, КР взаємозв’язані, тобто зміна одного з параметрів налаштування призводить до зміни інших.
2. Проаналізуємо властивості баластної ланки, для чого запишемо її передатну функцію у вигляді передатної функції інерційної ланки другого порядку:

а) 
K 1 у виразі для коефіцієнта передачі  знаходиться і в чисельнику, і в знаменнику, тобто є невизначеність виду
знаходиться і в чисельнику, і в знаменнику, тобто є невизначеність виду  . Для граничної системи можна визначити
. Для граничної системи можна визначити  , використавши правило Лопіталя (для чого і чисельник, і знаменник ділимо на K 1), і перевести невизначеність у знаменник виразу. Звідки граничне значення
, використавши правило Лопіталя (для чого і чисельник, і знаменник ділимо на K 1), і перевести невизначеність у знаменник виразу. Звідки граничне значення  для K 1→∞.
для K 1→∞.
Висновок 2: в граничній системі коефіцієнт баластної ланки наближається до одиниці.
б) 
Висновок 3: в граничній системі постійна часу баластної ланки наближається до нуля.
Висновок 4: в реальному регуляторі при K 1= const, перша постійна часу  залежить від всіх параметрів, що входять до її виразу, а саме
залежить від всіх параметрів, що входять до її виразу, а саме

в) Друга постійна часу баластної ланки  зв’язана з першою постійною часу
зв’язана з першою постійною часу  через вираз:
через вираз:
Висновок 5: постійні часу баластної ланки зв’язані між собою через параметр налаштування регулятора – постійну часу диференціювання ТД, тому можливі такі ситуації, коли інерційна ланка другого порядку стає нестійкою.
В залежності від співвідношення  і
і  можливі 4 види кривих розгону інерційної ланки другого порядку (рисунок 6.15):
можливі 4 види кривих розгону інерційної ланки другого порядку (рисунок 6.15):
г)  .
.


а) б) в) г)
Рисунок 6.15 – Криві розгону інерційних ланок другого порядку
Висновок 6: в залежності від співвідношення і можливі стійкі і нестійкі перехідні процеси в баластній ланці, причому вигляд перехідних процесів залежить від значення ТД.
3. Визначимо граничне співвідношення між параметрами ТИ і ТД:
Як було показано раніше, ТД і ТИ зв’язані між собою через параметри ланки ЗЗ Т 1 і Т 2, тому можна записати:
 ,
,
оскільки Т 1 і Т 2входять і в чисельник і в знаменник, то визначимо граничне значення цього відношення:
 .
.
Висновок 7: максимальне співвідношення ТД/ТИ можливо лише при Т 1 = Т 2, у інших випадках відношення буде менше 0,25, тобто ТД/ТИ ≤ 0,25.
4. Визначимо характеристики перехідних процесів у баластній ланці.
З дисципліни ТАУ відомо, що характер перехідного процесу залежить від значення коренів характеристичного рівняння.
Визначимо корені характеристичного рівняння.
Характеристичне рівняння будь-якої ланки записується шляхом прирівнення нулю знаменника передатної функції і заміни оператора Лапласа на літеру «р»:
 .
.
Визначимо дискримінант квадратного рівняння і, якщо його корні дійсні, то ланка стійка, якщо корні уявні – ланка нестійка:
 .
.
Вираз у перший дужці завжди позитивний, тому ми визначимо знак виразу в другій дужці:

Т.ч., вираз у другій дужці завжди від’ємний при будь-яких Т 1 і Т 2.
Висновок 8: дискримінант характеристичного рівняння від’ємний, корні характеристичного рівняння містять реальну і уявну частину, тому ця баластна ланка є інерційною ланкою другого порядку з коливально-затухаючим перехідним процесом. Крива розгону даного ідеального ПІД-регулятора має вигляд, зображений на рисунку 6.16,а.










а) б)
Рисунок 6.16 – Крива розгону (а) і його ОНР (б) реального ПІД-регулятора
Висновок 9: при кінцевих значеннях коефіцієнта передачі ОП K 1 крива розгону ПІД-регулятора може бути коливальною затухаючою, а при нескінченно великих значеннях коефіцієнта ОП K 1крива розгону буде близькою до ідеальної.
Тобто, для формування ПІД-закону в промислових регуляторах необхідно використовувати високоякісні операційні підсилювачі.
ОНР для ПІД-регулятора з трьома параметрами налаштування є тривимірною фігурою і її потрібно графічно зображувати у трьох координатах KР, ТИ, ТД. Для того, щоб перейти до двовимірного зображення, використовують накладання перетинів при фіксованих ТД (рисунок 6.16,б). Для кожного значення ТД можна знайти дозволені значення KР, при яких ∆M(ω) < 10%, а ∆Θ(ω) < 15º, де ∆M(ω) – різниця між модулями КЧХ реального і ідеального ПІД-регулятора, ∆Θ(ω) – різниця між фазами КЧХ.
б) без охоплення зворотнім зв’язком ВМ постійної швидкості
Оскільки ВМ не охоплений зворотнім зв’язком, і за своєю природою є інтегральною ланкою, то, виходячи з методу послідовної корекції, КПП повинен формувати ПДД2-закон перетворення вхідного сигналу (рисунок 6.17).
1-й крок. Оскільки ми використовуємо граничну систему в КПП, то визначимо передатну функцію ланцюга ЗЗ:

рисунок 6.17 – Структурна схема ПІД-регулятора без охопленням ВМ ЗЗ
 .
.
якщо винести за дужки KП і позначити його як 1/ KЗЗ, то знаменник можливо записати як рівняння другого порядку, т.ч. можна стверджувати, що в ЗЗ граничної системи потрібно встановити інерційну ланку другого порядку з аперіодичною кривою розгону.
Поиск по сайту: