АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Министерство образования и науки Российской Федерации 3 страница
2-й крок. Визначимо властивості реального ПІД-регулятора, для цього запишемо еквівалентну передатну функцію:

Винесемо за дужки загальний знаменник у знаменнику і, відповідно, після цього ми приходимо до вигляду інерційної ланки другого порядку, потім поділимо на K 1 ∙ KЗЗ, т.ч. у знаменнику є щось подібне до інерційної ланки другого порядку.

3-й крок: Розкриємо дужки, виділимо окремо передатні функції ідеального ПІД-регулятора та баластної ланки, для чого домножимо чисельник і знаменник на  і одержимо досить складний вираз:
і одержимо досить складний вираз:

4-й крок: Проаналізуємо властивості одержаного ПІД-регулятора:
1. Порівняємо передатні функції ідеального ПІД-регулятора і WEKB(s):

де  ,
,  .
.
Висновок 1:  параметри налаштування регулятора ТИ, KP визначаються через параметри ланки ЗЗ і ВМ.
параметри налаштування регулятора ТИ, KP визначаються через параметри ланки ЗЗ і ВМ.
Висновок 2: параметри налаштування регулятора ТИ, KP є взаємозв’язаними.
Аналогічно, параметр налаштування регулятора ТД жорстко залежить від КР і ТИ:

Висновок 3: всі параметри налаштування регулятора КР, ТИ, ТД взаємозв’язані, тобто, змінюючи один параметр, автоматично змінюються інші.
2. Проаналізуємо властивості баластної ланки (визначимо, наскільки вона спотворює закон регулювання):
 .
.
Висновок 4: Баластна ланка – це інерційна ланка другого порядку, яка може бути аперіодичною, коливальною, нестійкою, залежно від коренів характеристичного рівняння:
 .
.
Висновок 5: Коефіцієнт передачі баластної ланки в граничній системі наближається до одиниці, тобто баластна ланка не змінює амплітуду регулюючого сигналу.
Запишемо рівняння для  і
і  :
:
 .
.
Висновок 6: в ідеальній (граничній) системі з якісним ОП (K 1 > 10000) постійні часу баластної ланки ТБАЛ1 і ТБАЛ2 наближаються до 0, тобто баластна ланка в граничній системі є пропорційною ланкою з  = 1.
= 1.


Висновок 7: в реальному регуляторі постійні часу баластної ланки відмінні від нуля і визначаються параметрами налаштування регулятора, ВМ і ОП.
3. Визначимо граничне співвідношення між параметрами ТИ і ТД:
Як було показано раніше, ТД і ТИ зв’язані між собою через параметри ланки ЗЗ Т 1 і Т 2, тому можна записати:
 ,
,
оскільки Т 1 і Т 2входять і в чисельник і в знаменник, то визначимо граничне значення цього відношення:
 .
.
Висновок 7: максимальне співвідношення ТД/ТИ можливо лише при Т 1 = Т 2, у інших випадках відношення буде менше 0,25, тобто ТД/ТИ ≤ 0,25.
4. Визначимо характеристики перехідних процесів у баластній ланці.
З дисципліни ТАУ відомо, що характер перехідного процесу залежить від значення коренів характеристичного рівняння.
Визначимо корені характеристичного рівняння.
Характеристичне рівняння будь-якої ланки записується шляхом прирівнення нулю знаменника передатної функції і заміни оператора Лапласа на літеру «р»:
 .
.
Визначимо дискримінант квадратного рівняння і, якщо його корні дійсні, то ланка стійка, якщо корні уявні – ланка нестійка:
 .
.
Вираз у перший дужці завжди позитивний, тому ми визначимо знак виразу в другій дужці:

Т.ч., вираз у другій дужці завжди від’ємний при будь-яких Т 1 і Т 2.
Висновок 8: дискримінант характеристичного рівняння від’ємний, корні характеристичного рівняння містять реальну і уявну частину, тому ця баластна ланка є інерційною ланкою другого порядку з коливально-затухаючим перехідним процесом. Крива розгону даного ідеального ПІД-регулятора має вигляд, зображений на рисунку 6.16,а.










а) б)
Рисунок 6.16 – Крива розгону (а) і його ОНР (б) реального ПІД-регулятора
Висновок 9: при кінцевих значеннях коефіцієнта передачі ОП K 1 крива розгону ПІД-регулятора може бути коливальною затухаючою, а при нескінченно великих значеннях коефіцієнта ОП K 1крива розгону буде близькою до ідеальної.
Тобто, для формування ПІД-закону в промислових регуляторах необхідно використовувати високоякісні операційні підсилювачі.
ОНР для ПІД-регулятора з трьома параметрами налаштування є тривимірною фігурою і її потрібно графічно зображувати у трьох координатах KР, ТИ, ТД. Для того, щоб перейти до двовимірного зображення, використовують накладання перетинів при фіксованих ТД (рисунок 6.16,б). Для кожного значення ТД можна знайти дозволені значення KР, при яких ∆M(ω) < 10%, а ∆Θ(ω) < 15º, де ∆M(ω) – різниця між модулями КЧХ реального і ідеального ПІД-регулятора, ∆Θ(ω) – різниця між фазами КЧХ.
6.6 Реалізація ПІД-закону регулювання з неколивальною баластною ланкою

Рисунок 6.17 – Структурна схема ПІД-регулятора з неколивальною баластною ланкою
В основу такого ПІД-регулятора покладений ПІ-регулятор з неколивальною баластною ланкою, на його вхід подається сигнал розлагодження ε та його похідна (рисунок 6.17). Промислові ПІД-регулятори найчастіше побудовані за цією схемою. покажемо, що ця структура формує ПІД-закон регулювання.
Для цього запишемо еквівалентну передатну функцію:

замість реального ПІ-регулятора пишемо ідеальну передатну функцію і баластну ланку


позначимо KР*, TИ*, ТД*, т.ч. отримаємо рівняння ПІД-регулятора, де

Висновок 1. в цьому регуляторі параметри налаштування взаємозв’язані.

Висновок 2. передатна функція баластної ланки є з’єднанням двох послідовних інерційних ланок, тобто вона є неколивальною аперіодичною, тому що корні характеристичного рівняння дійсні.
Висновок 3. відношення  при найгірших умовах
при найгірших умовах  .
.
7 Промислові автоматичні регулятори з нелінійними елементами
7.1 Типові нелінійні ланки в промислових АР
В реальних промислових автоматичних регуляторахі завжди є вузли та пристрої з нелінійними статичними характеристиками, тобто ланки зі змінними коефіцієнтами передачі, величина яких залежить від значення вхідного сигналу.
Найбільш поширені в АР наступні типові нелінійні характеристики:
2) Нечутливість (рисунок 7.1,а), що властива операційним та магнітним підсилювачам, що не відчувають малі величини вхідного сигналу.
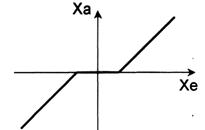
3) Обмеження (рисунок 7.1,б), що властиве операційним підсилювачам, в яких вихідний сигнал не може бути більше за напругу живлення. РО також мають обмеження на відкриття і закриття (0 –100 % ходу).
4) Нечутливість з обмеженням (рисунок 7.1,в), що властива операційним та магнітним підсилювачам, елементам порівняння, датчикам.
5) Ідеальне реле (рисунок 7.1,г) – операційні підсилювачі без зворотного зв’язку та механічні реле.
6) Гістерезис (рисунок 7.1,д), властивий елементам магнітних підсилювачів, електромагнітів, електронних пристроїв тощо, що можуть намагнічуватися і запам’ятовувати попередній стан.
7) Трипозиційне реле (рисунок 7.1,е), що використовується в пускових пристроях ВМ постійної швидкості. Вихідний сигнал має три дискретних стани: «Виключено», «Включено на відкриття РО», «Включено на закриття РО». Має два параметра налаштування: зону нечутливості ∆ і зону повернення ∆ в.
8) Люфт (рисунок 7.1,ж), властивий механічним редукторам ВМ, в яких при реверсі шестерні деякий час переміщуються в повітрі до з’єднання з іншими шестернями.
Загальним для типових та будь-яких довільних нелінійних характеристик є зміна величини коефіцієнта передачі ланки в залежності від величини вхідного сигналу, тобто кожна з цих статичних характеристик описується нелінійним алгебраїчним рівнянням.
Наявність в структурі автоматичного регулятора хоча б однієї нелінійної ланки робить його нелінійним.
Аналіз роботи таких регуляторів виконують у більш вузькому діапазоні роботи, ніж лінійних АР, що називають областю лінійної роботи (ОЛР).
ОЛР – це область у просторі амплітуди і частоти вхідного сигналу та параметрів налаштування автоматичного регулятора, в якій розширені частотні характеристики нелінійного регулятора і його лінійної моделі (ідеального регулятора) відрізняються не більше, ніж на наперед задані величини:

Якщо обмежити амплітуду і частоту вхідного сигналу, то в деякій області параметрів налаштування такий автоматичний регулятор буде працювати так само, як і звичайний ідеальний регулятор.


а) б) в)



г) д) е)

ж)
Рисунок 7.1 – Статичні характеристики типових нелінійних ланок АР
а – нечутливість, б – обмеження, в – нечутливість з обмеженням, г – ідеальне реле,
д – реле з гістерезисом, е – трипозиційне реле зонами нечутливості і повернення, ж – люфт
Властивості граничної системи дають можливість побудувати регулятори з властивостями ідеальних регуляторів у випадках охоплення і не охоплення нелінійної ланки F(xл) (рисунок 6.2).Нелінійна ланка зображена на рисунку у подвійній рамці. Особливістю нелінійних ланок є їх безінерційність, тобто миттєва дія.
Для дослідження властивостей нелінійного АР в граничній системі, використовується метод гармонійної лінеаризації, що був розроблений в 1940 р. Л.С.Гольдфарбом для аналіза АСР.
Якщо на вході безінерційної нелінійної ланки діє гармонійний синусоїдальний сигнал частотою ω, то стгнал на її виході містить спектр гармонійних складових з частотами ω, 2 ω, 3 ω і т.д. Необхідною умовою гармонійної лінеаризації є фільтрація вищих гармонік в лінійній інерційній частині системи, що дозволяє нехтувати ними.
коефіцієнт гармонійної лінеаризації є лінійне відношення, що зв’язує вхідну і вихідну величини нелінійної ланки. Комплексним коефіцієнтом передачі (ККП) нелінійної ланки називається відношення основних гармонік вихідного і вхідного сигналів, втраженних в комплексній формі.
Для всіх типових нелінійних ланок були визначені вирази  , що залежать від амплітуди вхідного сигналу і наводяться у довідниках з ТАУ, н.п. у [4]:
, що залежать від амплітуди вхідного сигналу і наводяться у довідниках з ТАУ, н.п. у [4]:
 ,
,
де  – змінна крутизни деякої лінеаризуючої прямої;
– змінна крутизни деякої лінеаризуючої прямої;
 – коефіцієнт при похідній від вхідної величини нелінійної ланки.
– коефіцієнт при похідній від вхідної величини нелінійної ланки.
Т.ч. в ОЛР при виконання обмежень за амплітудою і частотою вхідного сигналу, поведінка нелінійної ланки – трипозиційного релейного елементу, буде близькою до поведінки пропорційної ланки з відповідним комплексним коефіцієнтом передачі  .
.
7.2 Структурні схеми нелінійних АР, виконаних за методом граничної системи

а)

б)
рисунок 7.2 – Структурні схеми нелінійних АР, виконаних за методом граничної системи
без (а) та з охопленням (б) нелінійної ланки ЗЗ
К 1 – коефіцієнт передачі ОП, ∆ WЗЗ – передатна функція ланки ЗЗ, F(ХЛ) – нелінійна ланка, ХЛ, ХН – сигнали з виходу, відповідно, лінійної і нелінійної ланок, W1 – передатна функція нормуючого перетворювача, W2 – передатна функція ВМ
Для випадку (а) рисунку 7.2 можна записати еквівалентну передатну функцію:

де  .
.
Аналогічні властивості має також АР, побудований за структурою (б) рисунку 7.2.
З аналізу виразів для  можна зробити наступні висновки:
можна зробити наступні висновки:
1. в ОЛР в граничній системі властивості АР цілком визначаються передатною функцією лінійної ланки зворотного зв’язку WЗЗ, тобто в нелінійній системі можливо формувати будь-який лінійний закон регулювання (П, ПІ, ПІД) за рахунок підключення ланки зворотного зв’язку з потрібними властивостями.
2. в реальному регуляторі з нелінійною ланкою, в якому K 1 – кінцеве число, баластна ланка є інерційною ланкою, тому налаштування АР вибираються з врахуванням обмежень ОЛР.
3. ОЛР для АР з нелінійними ланками значно вужча, ніж ОНР, але в ній можливо використовувати всі рекомендації для лінійних АР, одержані вище.
Для ПІД-регулятора з нелінійною ланкою ОЛР буде мати наступні осі координат: амплітуда АЛ і частота ω вхідного сигналу, параметри нелінійної ланки (наприклад, для трипозиційного реле – це зона нечутливості Δ і зона повернення Δ В), параметри налаштування регулятора KР , ТИ , ТД .
Зображувати такий семивимірний простір можна у двовимірних графіках у вигляді набору перетинів цього простору з фіксованими значеннями інших 5 координат.
В промислових АР органи налаштування параметрів регулятора і релейного елементу мають шкали, побудовані для виконання обмежень ОЛР.
8 Основні режими роботи промислового автоматичного регулятора з ВМ постійної швидкості
АР з Вм постійної швидкості може мати наступні основні режими роботи:
1. Пульсуючий.
2. Режим постійної швидкості.
3. Змішаний.
4. Режим одноразового вмикання ВМ на половину періоду.
Пульсуючий режим – це рекомендований (робочий) режим, в якому формується лінійний закон регулювання. Інші три режими – це аварійні режими роботи, в які переходить АР при неправильних налаштуваннях АСР.
8.1 Пульсуючий режим
Умова роботи АР в пульсуючому режимі: швидкість зміни сигналу в ланці ЗЗ більша, ніж швидкість зміни вхідного сигналу:


Рисунок 8.1 – Робота АР в пульсуючому режимі
Розглянемо принцип формування ПІ-закону регулювання нелінійним АР, що містить трипозиційне реле і ВМ постійної швидкості (рисунок 8.2).

рисунок 8.2 – Структурна схема нелінійного АР
Виходячи з виводу рівняння баластної ланки для подібної структури регулятора (без охоплення ВМ зворотним зв’язком), було показано, що в граничній системі для формування ПІ-закону в зворотному зв’язку повинна міститься інерційна ланка першого порядку.
Розглянемо характеристику трипозиційного реле, що складається з двох гістерезисних областей, що характеризуються параметрами: ∆ в – зона повернення і ∆ – зона нечутливості. Ширина зони нечутливості ∆ розраховується такою, щоб вона була ширшою за амплітуду випадкових завад вхідного сигналу, ширина зони повернення ∆ в вибирається з умови компромісу між точностю формування закону регулювання і надійністю роботи ВМ. Сигнали релейного елементу вмикають ВМ на відкриття або закриття РО.
Робота АР при подачі на його вхід стрибкоподібного сигналу ε (рисунок 8.1):
Вхідний сигнал підсилюється операційним підсилювачем в K 1 раз, потім надходить на релейний елемент з трипозиційною релейною характеристикою.
В початковий момент сигнал на вході релейного елементу значно більший за зону нечутливості ∆/2, що призводить до включення релейного елементу, на його виході сигнал ХР буде дорівнювати логічній одиниці з знаком «+». включення ВМ у протилежному напрямку – логічна одиниця з знаком «–». В початковий момент реле включається, після цього сигнал ХР надходить одночасно на ВМ і на ланку ЗЗ. ВМ постійної швидкості є інтегральною ланкою, тому його вихідний сигнал є інтегралом від логічної одиниці і змінюється лінійно у часі (пряма лінія). Кут нахилу сигналу М(t) визначається відношенням  .
.
Сигнал на виході ланки ЗЗ змінюється за експонентою, тому що для формування ПІ-закону за теорією там знаходиться інерційна ланка першого порядку. Сигнал на вході релейного елементу є підсиленим в K 1 раз сигналом різниці вхідногосигналу e = const і сигналу ЗЗ: ХЛ = K 1∙(e – ХЗЗ).
Розглянемо роботу АР за рисунком 7.1 в моменти часу:
t 1: XЗЗ = 0;  XP = +1; ВМ включається; ХЗЗ ↑; ХЛ ↓.
XP = +1; ВМ включається; ХЗЗ ↑; ХЛ ↓.
t 2:  XP = 0; ВМ зупиняється; ХЗЗ ↓; ХЛ ↑.
XP = 0; ВМ зупиняється; ХЗЗ ↓; ХЛ ↑.
t 3:  ВМ включається; ХЗЗ ↑; ХЛ ↓.
ВМ включається; ХЗЗ ↑; ХЛ ↓.
Далі умови, що відповідають моментам t2 і t3, повторюються невизначено довго, і в подальшому сигнал на вході релейного елементу ХЛ змінюється в межах зони повернення Δ В, тобто перше включення ВМ має велику тривалість, а наступні включення – короткочасні.
Якщо виконати лінійну апроксимацію графіка переміщення РО, то можна побачити, що вона співпадає з кривою розгону ПІ-регулятора, але коефіцієнт передачі імпульсного регулятора визначається не на осі ординат, а в кінці першого імпульсу включення. В цьому відмінність графічного визначення параметрів налаштування реального регулятора від ідеального.
Оскільки промислові АР призначені для автоматизації інерційних об’єктів управління, то їх реакція на дію ідеального та реального регуляторів практично однакова, тому що вони є фільтрами високочастотних сигналів.
в залежності від параметрів нелінійної ланки промислові регулятори з одними і тими ж налаштуваннями можуть формувати різні за формою криві розгону. Наприклад, вплив зони повернення Δ В на тривалість імпульсів включення ВМ при однакових параметрах налаштування АР показаний на рисунку 8.3.
Рисунок 8.3 – Вплив параметрів релейного елементу на форму кривої розгону імпульсного регулятора
Параметри релейного елементу впливають на форму кривої розгону наступним чином:
1) Зона повернення ∆ B – зменшення зони повернення призводить до зменшення тривалості короткочасних вмикань ВМ і більш точного формування ПІ- закону в промисловому регуляторі. Ручка налаштування регулятора, що змінює зону повернення ∆ B називається «імпульс».
2) Зона нечутливості ∆ – впливає на величину статичної похибки регулювання, чим вона менша, тим точніше регулювання, але тим більшим є вплив випадкових завад.
Параметри релейного елементу виставляють із міркувань найменшого впливу випадкових завад в сигналі ε, а ручку «імпульс» – в таке положення, щоб ВМ не вмикався більше 6-10 разів за хвилину (з міркувань захисту обмоток електродвигуна від перегрівання пусковими струмами та спрацювання редуктора і РО).
Настіпні три режими роботи АР являються нелінійними і забороненими, оскільки ніякого закону вони не формують, а призводять до виходу з ладу ВМ і РО.
8.2 Режим постійної швидкості переміщення РО
Умова виникнення даного режиму: швидкість зміни сигналу ЗЗ менша або дорівнює швидкості зміни вхідного сигналу ε. Часто причиною виникнення цього режиму може бути помилка в визначення параметрів налаштування АР.
 .
.

Рисунок 8.4 – Режим постійної швидкості переміщення РО
На верхньому графіку рисунка 8.4 показана лінія зміни вихідного сигналу під час процесу регулювання.
При появі сигналу розлагодження e сигнал ЗЗ XЗЗ довгий час відстає за амплітудою від вхідного сигналу, тобто їх різниця довгий час є більшою зони нечутливості реле Δ і весь цей час релейний елемент включений. Внаслідок цього ВМ довгий час переміщує РО, що доходить до крайнього положення і залишається в ньому повністю відкритим або повністю закритим до тих пір, поки вхідний сигнал e не зменшиться за рахунок природної зміни вихідного сигналу об’єкта управління Ха і потім довгий час він знов не буде меншим сигналу ЗЗ.
Внаслідок цього ВМ знов дійде до протилежного крайнього положення і далі в системі буде формуватися двопозиційне регулювання, тобто виникнуть автоколивання.
Цей режим роботи АР заборонений за причинами:
1. внаслідок швидкого зношування ВМ і РО.
2. амплітуда відхилень регульованого параметра перевищує допустимі технічним регламентом відхилення, що викликає спрацювання сигналізації або автоматичного захисту.
Повернення до пульсуючого режиму із цього режиму – шляхом встановлення правильно визначенних налаштувань регулятора КР, ТИ.
8.3 Сумісний режим
Умова виникнення цього режиму роботи АР:  .
.
Цей режим виникає наприкінці роботи регулятора в першому режимі, коли випадкові коливання сигналу неузгодження мають амплітуду, близьку до ширини зони нечутливості (рисунок 8.5), при цьому параметр Ха хоча і відрегульований, але релейний елемент почергово короткочасно вмикається в протилежних напрямках (світлофорний ефект).
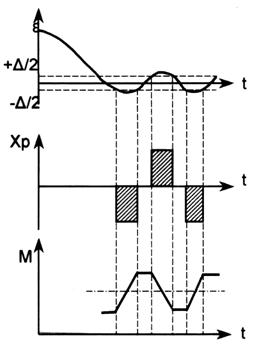
Рисунок 8.5 – Сумісний режим роботи АР
З графіку рисунка 8.5 видно, що РО коливається відносно середнього значення параметру Ха. Режим заборонений тому, що приводить до швидкої поламки ВМ (в редукторі зношуються шестерні, електродвигун виходить з ладу тому, що пускові струми двигунів на порядок більші, ніж номінальні струми живлення). Тепловий ефект (виділення тепла на обмотках двигуна) пропорційний квадрату струму, тому в пускових режимах двигун нагрівається значно сильніше, ніж в номінальних режимах.
Щоб повернутися з цього режиму в перший, потрібно збільшити зону нечутливості Δ або зменшити зона повернення Δ В (тривалість імпульсів включення).
Поиск по сайту: