АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Министерство образования и науки Российской Федерации 4 страница
8.4 режим одноразового вмикання ВМ на половину періоду
Умова виникнення режиму:
 .
.
цей режим виникає або внаслідок вибору неправильних налаштувань АР, або неправильного вибору ВМ: вибрані або дуже великий коефіцієнт передачі регулятора КР, або дуже мала постійна часу інтегрування ТИ, або дуже швидкий ВМ, або всі ці умови разом.

Рисунок 8.6 – режим одноразового вмикання ВМ на половину періода
Швидкість зміни сигналу ЗЗ набагато більша швидкості зміни вхідного сигналу, при цьому найкоротше включення релейного елементу приводить до значного переміщення РО і великої зміни сигналу ЗЗ (рисунок 8.5). Різниця між сигналами ε і xЗЗ буде швидко змінювати свій знак на протилежний, тобто за одне коротке включення ми переходимо за межі зони нечутливості протилежного знаку. Внаслідок цього реле включає ВМ в протилежному напрямку і реверсування ВМ відбувається безперервно.
Електродвигун при цьому швидко перегрівається пусковими токами і виходить з ладу, а редуктор (шестерні) інтенсивно зношується.
Для виходу з цього режиму необхідно:
1. Правильно вибрати налаштування АР КР, ТИ, ТД .
2. Якщо це не дає ефекту, то потрібно замінити ВМ на більш повільний, вибравши його з ряду часів сервомоторів: ТВМ = 10, 25, 63, 250, 450, 630 с.
9 Електричні засоби автоматичного регулювання
9.1 Особливості і області використання електричних засобів автоматичного регулювання
Вони використовуються у всіх галузях виробництва, де немає вибухо- і пожежонебезпечних технологій, (тобто в тих випадках, коли поява іскри не приводить до небажаних наслідків): енергетика (теплова і атомна), металургія, нафтопереробка, хімія.
Особливості промислових електричних засобів автоматизації:
1. більшість технологічних параметрів вимірюються датчиками з вихідними електричними сигналами.
2. Висока чутливість приладів (великий коефіцієнт передачі).
3. Формування закону регулювання виконується в електричних аналогових регуляторах апаратним шляхом, а в цифрових – апаратно-програмним.
В аналогових регуляторах використовуються властивості граничної системи, тобто формування закону здійснюється в ланці негативного ЗЗ ОП.
В цифрових регуляторах схемним шляхом виконується аналогово-цифрові і цифро-аналогові перетворення сигналів, а закон регулювання розраховується шляхом використання кінечно- різницевих рівнянь в рекурентній формі
 .
.
4. Використання простих одно- та трифазних асинхронних електродвигунів у ВМ постійної швидкості.
5. Використання трипозиційного реле з зоною нечутливості і зоною повернення для управління ВМ постійної швидкості.
6. Оскільки в аналогових регуляторах інерційні ланки в ЗЗ реалізуються у вигляді пасивних RC -ланок, то для одержання потрібного значення постійної часу інтегрування (ізодрому), потрібно використовувати дуже високоомні резистори і конденсатори великої ємності, а опір вхідних ланцюгів ОП повинен складати сотні МОм.
7. Автоматичний регулятор повинен працювати в трьох режимах: автоматичному, ручному (дистанційного управління ВМ), вимкнутому.
У вимкнутому стані ВМ повинен фіксувати положення РО, незалежно від навантаження на ньому, тобто одна із ступенів редуктора повинна бути черв’ячною з кутом нахилу зубців < 300.
8. ВМ повинні мати мінімальні часи розгону та вибігу.
Час розгону – це час, за який електродвигун ВМ набирає повні оберти після включення. Час вибігу – це час, за який електродвигун зупиняється після виключення електроенергії.
Зменшення часу розгону досягається шляхом вибору більш потужного ВМ, у якого момент обертання більше моменту опору РО. Час вибігу можливо зменшити за рахунок використання електричних та механічних гальмівних пристроїв ВМ.
9. Конструкція промислових АР дозволяє розташовувати його складові частини в різних місцях ТОУ, а саме: ВМ на технологічному обладнанні поряд з РО; КПП та елементи порівняння в окремому приміщенні регуляторів; Індикатори та задатчики – на пульті управління (тобто на робочому місті оператора-технолога), там же розташовуються блоки управління для вибору режимів роботи АСР «Автомат», «ручний», а в ручному – кнопки «Більше», «Менше» для дистанційного управління положенням РО.
Примітка: при використання цифрових регуляторів інформація оператору-технологу виводиться на монітор, а введення команд здійснюється за допомогою промислових клавіатур та сенсорних екранів.
10. В промислових регуляторах розповсюджений блочно-модульний принцип побудови.
11. Можливість використання великої кількості допоміжних пристроїв. Наприклад, будь-якого ВМ постійної швидкості, потужністю від 50 Вт до 100 кВт; будь-яких блоків управління, що мають перемикачі «Автомат-ручний» і кнопки «Більше», «Менше».
12. Промислові АР повинні мати аналоговий або цифровий інтерфейс для зв’язку з керувальним обчислювальним комплексом (КОК).
9.2 Загальні відомості про історію розвитку електричних систем ТЗА
Починаючи з 50-х років минулого сторіччя почався масовий випуск промислових регулюючих приладів: електричних, пневматичних, гідравлічних.
Вже перші промислові регулюючі прилади використовували для формування законів регулювання властивості граничної системи, операційні підсилювачі на великих радіолампах, трипозиційні реле для управління пусковими простроями ВМ.
Першим і основним виробником промислових регулюючих приладів був і досі залишається Московський завод теплової автоматики (МЗТА).
Перший промисловий регулятор МЗТА називався ЕР-52 (рік випуску), елементна база – великі радіолампи. Наступні модифікації приладів МЗТА з релейним виходом на радіолампах: ЭР-54, ЭР-60, РПИК, РПИБ.
Промислові регулюючі прилади МЗТА на транзисторах та інтегральних мікросхемах: системи приладів «Каскад» – 1978 р., «Каскад-2» – 1983 р., АКЭСР – 1976 р., АКЭСР-2 – 1980 р., «Контур» – 19хх р., «Контур-2» – 19хх р.
Промислові цифрові регулятори та контролери на мікропроцесорах і однокристальних мікроЕОМ: «Ремиконт» – з 1986 р., «Протар» – з 19хх р.
Крім МЗТА випускались і інші електричні системи і засоби автоматизації: ЕАСУ – електрична агрегатна система управління, УСАКР – уніфікована система автоматичного контролю і регулювання, Теплоприбор.
Найбільш розповсюдженою в хімічній, металургічній, харчовій промисловостях і в енергетиці є пневматична система приладів УСЭППА (універсальна система елементів промислової пневматичної автоматики), що використовує уніфіковані пневматичні сигнали в діапазоні від 0,2 до 1 кгс/см2 (0,02-0,1 МПа) і складається з набору пневматичних пристроїв, кожний з яких виконує елементарну операцію і має уніфіковані приєднувальні і установочні розміри. Виробник: «КИП», м. Оренбург.
Сучасні виробники промислових АР в СНГ продовжують випуск деяких розповсюджених систем аналогових приладів регулювання і переходять на виробництво більш сучасних мікропроцесорних систем ТЗА, наприклад, фірми «Овен», «Круг» (Росія), «Раут» (україна), та інші.
Значний об’єм ринку ТЗА і ПЗ зараз захопили відомі світові виробники: Advantech, Siemens, Wago, Octagon Systems, Iconics, Fastwel та інші.
9.3 Функціональна схема електричних систем ТЗА

Рисунок 9.1 – Функціональний склад електричних аналогових систем ТЗА
Аналогові ТЗА мають наступні функціональні блоки (рисунок 9.1):
ПП – первинні вимірюючі перетворювачі, призначені для перетворення значення технологічного параметра в уніфікований аналоговий сигнал для передачі на відстань;
ВБ – вимірюючий блок, призначений для формування сигналу неузгодження за функцією, є елементом порівняння поточного і заданого значення;
ЗдП – задаючий пристрій для формування завдання;
ЕБ – електричний блок, функція аналогічна функції КПП;
ПУ – пристрій управління, призначений для вибору режиму роботи АСР (автоматичного або ручного) та управління ВМ в ручному режимі;
ПП – пусковий пристрій, призначений для подачі одно- чи трифазної зовнішньої енергії на електродвигун;
ВМ – виконавчий механізм, призначений для переміщення РО. Складається з електроприводу і понижуючого редуктора;
ІП – індикатор положення, призначений для інформування оператора-технолога про ступінь відкриття РО;
ЗП – зовнішній пристрій, призначений для виконання додаткових функцій при роботі технічного засобу в складі АСУТП. Наприклад, для:
1. Дистанційної зміни завдання від КОК в супервізорному режимі роботи АСУТП.
2. Дистанційної зміни налаштувань електронного блоку.
3. Дистанційного управління режимами роботи блоків (відключення одних регуляторів і включення в роботу інших, наприклад, при реалізації АСР змінного складу, що потрібно в пускових режимах і в режимах автоматичної зупинки).
4. Передачі інформації від первинних перетворювачів до робочого комплексу.
10 Електрична уніфікована система приладів автоматичного регулювання «Каскад»
Призначена для побудови складних систем автоматичного регулювання з використанням переважно уніфікованих електричних сигналів: 0-5, 0-20 та 4-20 мА, 0-10 В.
Функції, що реалізовані системою «Каскад»:
1. Автоматичне регулювання за ПІ та ПІД-законами.
2. Дистанційне управління (ручне управління).
3. Алгебраїчні операції (додавання, множення, ділення).
4. Динамічні нелінійні і логічні перетворення.
5. Індикація вхідних та вихідних сигналів.
Використовується для побудови нижнього рівня АСУТП в тепловій та атомній енергетиці та в інших, де постійні часу об’єкта знаходяться в межах ТО = 0,2...2000 с.
Можлива побудова наступних АСР:
1. Одноконтурних локальних АСР.
2. Багатоконтурних систем АСР з введенням коригуючих пристроїв і перехресних зв’язків.
3. Каскадне регулювання АСР.
4. Системи із введенням логічних і коригуючих впливів від промислових комп’ютерів в АСУТП.
5. Складні багатомережні АСР.
6. Системи змінної структури.
Відмінні риси:
1. Система «Каскад» є транзисторною уніфікованою системою. Система «Каскад-2» виконана на аналогових інтегральних мікросхемах.
2. Використання переважно уніфікованих сигналів.
3. Суміщення багатьох функцій в кожному приладі.
4. Підвищена точність виконання операцій.
5. Підвищена стабільність статичних та динамічних характеристик.
6. Висока надійність.
Прилади системи «Каскад» розташовані у трьох зонах АСУТП:
1. прилади панелі регулювання – це всі основні блоки, що були вказані вище. Вони розташовані в приміщеннях з обмеженим доступом. Для зменшення небезпеки від несанкціонованої доступу до органів налагодження, вони сховані в середині корпуса.
2. прилади блочного щита і пульта керування. До них відносяться допоміжні пристрої, а саме: 1) ручні задатчики, 2) блоки управління, що переключають режими роботи системи, 3) індикатори положення РО і сигналу неузгодження.
3. блоки збірки управління ВМ розташовані на обладнанні об’єкта управління. До них відносяться: пускові пристрої, ВМ, РО. Ці прилади в систему «Каскад» не входять, але мають діапазон сигналів управління той же, що і блоки системи «Каскад».
Розрахунок і вибір ВМ і РО виконуються для кожного конкретного випадку їх використання. вони не замовляються окремо, якщо є комплектуючими приладами для обладнання, наприклад: система регулювання головної парової засувки турбіни (ГПЗ) поставляється разом з турбіною, але сприймає сигнали управління від приладів системи «Каскад».
10.1 Склад системи «Каскад»
Система приладів «Каскад» містить 10 груп функціональних приладів:
1. Регулюючі блоки, позначення їх типу починається з літери «Р», до їх складу входять прилади:
 Р21 – релейно-імпульсний регулюючий аналоговий прилад з імпульсним виходом, формує ПІ-закон регулювання.
Р21 – релейно-імпульсний регулюючий аналоговий прилад з імпульсним виходом, формує ПІ-закон регулювання.
Р23 – те ж саме, що і Р21, з триступінчатою перебудовою параметрів налаштування.
 Р12 – аналоговий регулюючий прилад з аналоговим виходом, формує ПІД-закон регулювання.
Р12 – аналоговий регулюючий прилад з аналоговим виходом, формує ПІД-закон регулювання.
Р13 – те ж, що і Р12, з триступінчатою перебудовою параметрів налаштування.
Р13.2 – аналог Р12, але з вхідним неуніфікованим сигналом від термопари.
2. Алгебраїчні блоки («A»):
 А04 – алгебраїчний блок для підсумовуваня 4 сигналів з незалежним масштабуванням і гальванічним розділенням.
А04 – алгебраїчний блок для підсумовуваня 4 сигналів з незалежним масштабуванням і гальванічним розділенням.
А31 – блок перемноження або зведення в квадрат струмового сигналу.
А32 – блок ділення.
А33 – блок витягання квадратного кореня.
 3. Вимірюючі блоки («И»):
3. Вимірюючі блоки («И»):
И04 – вимірюючий блок.
4. Блоки динамічного перетворення («Д»):
 Д01 – блок диференціювання.
Д01 – блок диференціювання.
Д05 – блок інтегрування.
5. Блоки нелінійних перетворювань («Н»):
 Н01 – блок лінійно-кускової апроксимації. Основу цього блоку складать 6 діодно-функціональних перетворювачів – діодів, що закриті опорними напругами. При вхідній напрузі, меншій опорної діод закритий, якщо напруга стає більшою за опорну – діод відкривається і додає до вихідного сигналу свою частку напруги.
Н01 – блок лінійно-кускової апроксимації. Основу цього блоку складать 6 діодно-функціональних перетворювачів – діодів, що закриті опорними напругами. При вхідній напрузі, меншій опорної діод закритий, якщо напруга стає більшою за опорну – діод відкривається і додає до вихідного сигналу свою частку напруги.
6. Блоки логічних перетворювань («Л»):
Л05 – дозволяє виділити найбільший або найменший сигнал із кількох вхідних, або виконати перемикання схеми при заданих співвідношеннях між сигналами.
7. Задатчики («ЗУ»):
 ЗУ11 – потенціометричний задатчик.
ЗУ11 – потенціометричний задатчик.
 ЗУ05 – струмовий задатчик.
ЗУ05 – струмовий задатчик.
8. Блоки управління («БУ»), мають номер, що відповідає номеру регулюючого приладу, в комплекті з яким він працює:
 БУ21 – працює у комплекті з регулюючим блоком Р21;
БУ21 – працює у комплекті з регулюючим блоком Р21;
 БУ12 – працює у комплекті з регулюючим блоком Р12.
БУ12 – працює у комплекті з регулюючим блоком Р12.
9. Допоміжні пристрої («В»):
 В12 – стрілочний індикатор, що має дві шкали: першу, для індикації сигналу неузгодження ε в межах ±25 % від εмах = 2,5 В, тобто від –0,625 В до +0,625 В, і другу, для індикації положення РО в межах 0...100% ходу РО, що надходить від струмового датчика положення РО. індикатором цей прилад називається тому, що його клас точності 4,0.
В12 – стрілочний індикатор, що має дві шкали: першу, для індикації сигналу неузгодження ε в межах ±25 % від εмах = 2,5 В, тобто від –0,625 В до +0,625 В, і другу, для індикації положення РО в межах 0...100% ходу РО, що надходить від струмового датчика положення РО. індикатором цей прилад називається тому, що його клас точності 4,0.
 В01 – діодно-захисний пристрій для захисту струмових ліній від розриву.
В01 – діодно-захисний пристрій для захисту струмових ліній від розриву.
 В21 – пристрій захисту вихідних ланцюгів блоку р21 при індуктивному навантаженні.
В21 – пристрій захисту вихідних ланцюгів блоку р21 при індуктивному навантаженні.
 10. Тиристорні підсилювачі («У») – безконтактні пускові пристрої для трифазних виконавчих механізмів.
10. Тиристорні підсилювачі («У») – безконтактні пускові пристрої для трифазних виконавчих механізмів.
10.2 Принципи побудови приладів системи «Каскад»
Система «Каскад» є аналоговою, тому всі обчислення і перетворення сигналів виконуються в аналоговому процесорі схемним (апаратним) шляхом. Наприклад, аперіодичне та диференційне перетворення сигналу виконується пасивними RC -ланками (рисунок 10.1). Ці RC -ланки використовуються в ланцюгах ЗЗ для формування закону регулювання.

Рисунок 10.1 – Формування диференціюючого та аперіодичного закону
пасивними RC -ланками
Аналоговий процессор виконаний на ОП, охопленому негативним ЗЗ. Т.ч., при побудові приладів «Каскад» використовуються властивості граничної системи (рисунок 10.2), в якій вид ланки ЗЗ визначає закон регулювання.

рисунок 10.2 – гранична система
Ця структура є універсальною для всіх аналогових приладів.
 (10.1)
(10.1)
При К 1 > 10000 можна вважати, що виконується ідеальний закон регулювання.
Особливості реалізації граничної системи в системі «Каскад»:
1. Оскільки операційні підсилювачі мають прямий та інверсний входи, то використовується два види ЗЗ з різними передатними функціями, тобто розрізняють ЗЗ послідовні (рисунок 10.3) і паралельні (рисунок 10.5).
2. використання на входах і виході ОП уніфікованих струмових сигналів, в той час, як ОП підсилює напруги.
10.2.1. Реалізація аналогового процесора з використанням паралельного ЗЗ
Передатна функція ОП з паралельним ЗЗ (рисунок 10.3):
 .
.
В цьому разі використовується лише інвертуючий вхід 1, тобто полярність вихідного сигналу протилежна полярності вхідного.

Рисунок 10.3 – Включення ОП з паралельним ЗЗ
Вхідний струмовий сигнал перетворюється у вхідну напругу на резисторі RВХ, вхідним комплексним опором ZВХ і комплексним опором ЗЗ можуть бути: резистор R, конденсатор С або індуктивность L для формування потрібного закону перетворення.
Комплексний коєфіцієнт передачі ОП з паралельним ЗЗ визначається відношенням ZОС/ZВХ.
До виходу ОП приєднаний перетворювач напруги у струм. RН – опір вхідного каскаду приєднанного наступного приладу, якщо RЗЗ і RН різні, то це додатково враховуєтьсяч, як їх відношення.
Відомо, що коли на до входу ОП приєднаний конденсатор С, а у негативному ЗЗ – опір R, то формується Д-закон (рисунок 10.4,а), якщо поміняти місцями конденсатор C і опір R – І-закон (рисунок 10.4,б). На рисунку 10.4,в показана схема масштабуючого суматора, в якому коефіцієнт підсилення по кожному входу визначається відношенням опору резистора RЗЗ до опору вхідного резистора RBXi
 .
.


рисунок 10.4 – Схеми підключення RC-ланок до ОП для формування
а – диференціатора, б – інтегратора, в – суматора з масштабуванням
Назва «паралельний ЗЗ» виникла внаслідок двох одночасних напрямків передачі сигналів через ОП: в прямому напрямку – через інверсний вхід ОП, в зворотньому – через опір ЗЗ ZЗЗ.
10.2.2. Реалізація аналогового процесора з використанням послідовного ЗЗ
Передатна функція послідовного ЗЗ (рисунок 10.6)
 .
.
Вхідний сигнал надходить на прямий вхід 2, проходить на вихід підсилювача і через комплексний опір ЗЗ ZЗЗ надходить на інвертуючий вхід 1 і далі знову проходить на вихід ОП. Т.ч., така схема одержала назву від послідовного проходження сигналом двох входів одного і того ж підсилювача

рисунок 10.5 – Структурна схема побудови приладів з послідовним ЗЗ
ця схема використовується у випадках:
1. Коли знаки вхідного і вихідного сигналів повинні бути однаковими.
2. коли потрібно мати вхідний опір підсилювача більше 100 Мом, це вхідний опір високоякісного підсилювача.
10.3 Операційні підсилювачі системи «Каскад»
прилади системи «Каскад» побудовані за принципом граничної системи (10.1), тому в них використовуються ОП, охоплені різними ЗЗ.
Розглянемо побудову операційних підсилювачів системи «Каскад» реалізованих на ферит-транзисторних елементах (рисунок 10.6). ОП має інверсний вхід 1, прямий вхід 2 і загальну точку ОТ.
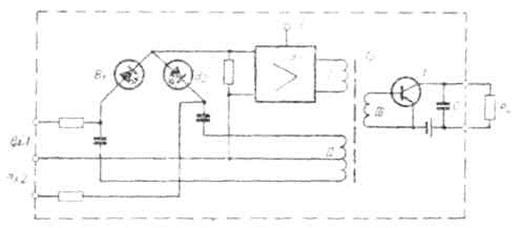
рисунок 10.6 – Спрощена схема операційних підсилювачів системи «каскад»
Схема ОП виконана т.ч., щоб використовувати однополярні вхідні уніфіковані струмові сигнали 0-5 мА, тому негативні вхідні сигнали не сприймає.
Вхідна схема ОП виконана у вигляді мостової схеми, у двох плечах якої знаходяться варікапи В 1 і В 2, що являються діодами, міжелектродна ємність яких залежить від прикладеної напруги, тобто вони є змінними конденсаторами, що проводять струм в одному напрямку. В двох інших плечах мостової схеми містяться постійні конденсатори, включені послідовно з вторинними обмотками трансформатора Тр.
Вимірююча діагональ мостової схеми підключена до входу підсилювача змінної напруги, що має позначення У, діагональ живлення підключена до входів 1 і 2 таким чином, що коли на вхід 1 подається вхідний сигнал Ue 1 з полярністю, при якій варікапи працюють у режимі змінних конденсаторів, то в контурі «вхідний міст-ОП-трансформатор-вхідний міст» утворюються автоколивання з частотою біля 1 МГц і амплітудою, пропорційною вхідному сигналу.
На обмотці ІІІ трансформатора утворюється зміна напруга  , що на транзисторі Т і конденсаторі С демодулюється у постійну вихідну напругу.
, що на транзисторі Т і конденсаторі С демодулюється у постійну вихідну напругу.
Якщо на вхід 2 подана вхідна напруга Ue 2 протилежного знаку, то вихідна напруга визначається за рівнянням 
 . При цьому прямий вхід 1 не змінює знак вихідної напруги, інверсний – змінює.
. При цьому прямий вхід 1 не змінює знак вихідної напруги, інверсний – змінює.
Якщо полярність вхідних сигналів Ue 1 або Ue 2 відкриває варікапи, то підсилювач охоплюється негативним ЗЗ, автоколивання зникають і підсилювач не буде фукціонувати.
В системі «Каскад» використовується 3 типи операційних підсилювачів, виконаних за цією схемою:
УВ-22 – однополярний підсилювач, вхідний сигнал 0–5 мА, вихідний сигнал 0–5 мА, коефіцієнт передачі Кп = 1,5 мА/мВ.
УВ-21 – з додатковим виходом за напругою 0–10 В.
УВ-41 – двополярний підсилювач від -5 до +5 мА.
ОП виконані у вигляді модулів з розмірами, трохи більшими сірникової коробки.
10.4 Модулі гальванічного розділення МП-04
Призначені для захисту вхідних ланцюгів приладів системи «Каскад» від коротких замикань в ланцюгах датчиків і перенапружень до 3000 В, побудовані за МДМ-принципом (модуляція-демодуляція).
Під модуляцією розуміється перетворення постійного струму у сигнал змінної напруги з тією ж амплітудою, під демодуляцією – зворотнє перетворення сигналу змінної напруги в сигнал постійного струму.
Гальванічне розділення виконується на трансформаторі Тр, обмотки якого ізольовані одна від одної, а передача енергії виконується магнітним полем через феритовий магнітопровід. Модуль МП-04 діє наступним чином (рисунок 10.7).

Рисунок 10.7 – вузол гальванічного розділення сигналів
Електронний ключ K 1 з частотою 20 кГц перетворює постійний сигнал UBX в змінний сигнал типу «пряма хвиля». Магнітний потік, що утворюється внаслідок проходження струму через первинну обмотку І, проходить через магнітопровід трансформатора Тр і генерує таку ж саму за формою та амплітудою напругу у вторинній обмотці ІІ, для чого число витків первинної та вторинної обмоток розраховано таким чином, щоб UBИX = UBX і коефіцієнт передачі МП-04 дорівнював би одиниці з високою точністю.
Оскільки ключі K 1 і K 2 працюють синхронно, то згладжуючий конденсатор С в моменти замикання ключів заряджається, а в моменти їх розмикання віддає свою енергію для підтримання вихідної напруги UВИХ.
Враховуючи велику частоту модуляції, сигнали UВХ і UВИХ змінюються у часі однаково, але не мають електричного з’єднання, тобто гальванічно розділені один від одного.
10.5 Захист струмових ланцюгів від розриву
В багатьох схемах автоматизації уніфікований струмовий сигнал від одного датчика може використовуватися одночасно кількома вторинними приладами (рисунок 10.8): 1 – в АСК (показуючий прилад); 2 – в АСР (вимірюючий блок И04); 3 – в уніфікованому комплексі технологічних захистів УКТС (блок АДП).

рисунок 10.8 – Схема розподілення струмового сигналу 0-5 мА
При розриві струмового ланцюга всі послідовно з’єднані прилади одночасно втрачають інформацію про стан об’єкта управління: оператор-технолог перестає одержувати візуальну інформацію, АСР втрачає можливість формувати закон регулювання, автоматичний захист спрацьовує і зупиняє технологічний процес. Для попередження цієї ситуації паралельно кожному вторинному приладу підключають діодно-захисні пристрої типу В01, що є стабілітронами типу КС156А з напругою стабілізації UСТ = 5,6 В в режимі стабілізації і UСТ = 1,5 В при включенні в провідному напрямку.
Якщо падіння напруги на вхідному резисторі приладу при максимальному струмовому сигналі Імах = 5 мА менше UСТ, то стабілітрон закритий і не пропускає через себе струм. При перевищенні напруги на вхідному резисторі приладу напруги стабілізації (при розриві лінії датчик підвищує свою вихідну напругу для відновлення струму) стабілітрон відкривається, стає провідником і шунтує розрив лінії, відновлюючи протікання струму через інші прилади. Якщо максимальне падіння напруги на вхідному резисторі приблизно дорівнює напрузі стабілізації, то для надійного спрацювання встановлюють два захисних пристроя В01. При малих вхідних опорах приладів пристрій В01 включається в провідному напряму.
10.6 Допоміжні пристрої
10.6.1 Потенціометричний задатчик ЗУ11
Задатчик ЗУ11 – найпростіший прилад системи «Каскад», являє собою дротовий змінний резистор опором 2,2 кОм з лінійною статичною харатеристикою.
Призначений для перетворення кута повороту потенціометра в сигнал опору. Використовується як задатчик разом із вимірюючим блоком И04 або як дільник вхідного сигналу для масштабування сигналу без гальванічного розділення(КП = 0...1).
10.6.2 струмовий задатчик ЗУ05
Призначений для перетворення кута поворота потенціометра у струмовий сигнал від 0 до 5 мА.
Складається з (рисунок 10.9): 1 – джерела стабілізованої напруги для живлення потенціометра 2 з лінійною характеристикою; 3 – перетворювача напруги у струм на транзисторі, що включений за схемою із загальною базою, при цьому його внутрішній опір змінюється в залежності від положення потенціометра 2; 4 – джерела живлення.


рисунок 10.9 – принципова електрична схема задатчика ЗУ05
Поиск по сайту: