АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Министерство образования и науки Российской Федерации 5 страница
від положення повзунка потенціометра 2 залежить динамічний опір транзистора 3, через який протікає струм від джерела живлення до опору навантаження. Схема виконана т.ч., що вона також стабілізує струм при зміні величини навантаження. Для різних діапазонів опорів потрібно приєднувати навантаження до різних клем 5, 6, 7 задатчика.
Використання струмового задатчика ЗУ05:
1. Коли потрібно передати струмовий сигнал на великі відстані тому, що ЗУ05 є стабілізатором струму і опір кабелю не впливає на величину струму.
2. Для подачі сигналу завдання безпосередньо на регулюючий прилад, коли не використовується вимірюючий блок И04 і сигнал неузгодження ε формується в регулюючому приладі.
3. Разом із блоком И04, коли сигнал завдання використовується кількома приймачами.
4. Коли потрібно компенсувати сигнал зміщення 2,5 мА (50%) у блоках, наступних за А04.
10.6.3 Програмний задатчик ЗУ55
призначений для формування струмового сигналу завдання, що змінюється за заданим у часі законом. Виконаний на базі вторинного приладу КСП2.
графік зміни завдання у часі (н.п., графік залежності тиску у пусковому відсіку турбіни енергоблоку) зображується широкою чорною лінією на спеціальній паперовій або пластиковій стрічці. До стрілки приладу прикріплені оптичні датчики слідкуючої системи, що змінює положення стрілки таким чином, щоб завжди один фотоприймач знаходився над чорною лінією завдання, а інший – над світлою фону. Стрілка зв’язана механічною передачею з повзунком реохордом, сигнал якого надходить на перетворювач напруги в струм 0-5 мА.
10.7 Блоки управління
10.7.1 Блок управління релейного регулятора БУ21
Блок призначений для безпоштовхового перемикання з автоматичного управління на ручне і навпаки, ручне управління навантаженням регулюючого блоку Р21.
Схема блоку БУ21 (рисунок 10.10) містить галетний перемикач управління 4, кнопочний перемикач ручного управління 1 для управління в бік «Больше» («Б») і в бік «Меньше» («М»), кнопку «И» виклику індикації 3 і два світлових індикатора 2 («Б» і «М»), що сигналізують дію регулятора відповідно в бік «Больше» і «Меньше».
Перемикач управління має три фіксованих положення, що відповідають автоматичному (А), ручному (Р) і зовнішньому (В) режимам роботи регулятора. При роботі в ручному режимі при одночасному натисканні кнопок «Б» і «М» сигнал ручного управління відсутній.
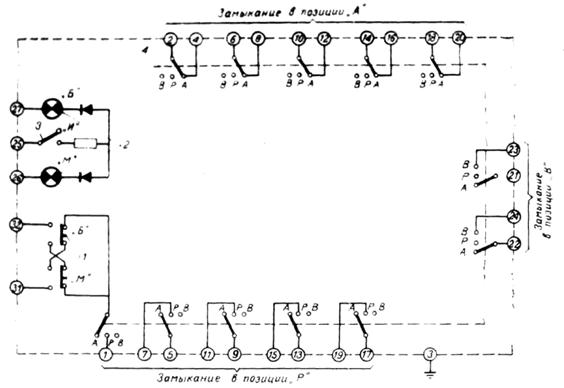
Рисунок 10.10 – Принципова електрична схема блоку БУ21
На рисунку 10.11 наведено використання блока БУ21 в складі регулюючого блока Р21, що працює в комплекті з магнітним пускачем ПМРТ-69, обмотки якого однаково реагують на напругу постійного струму 24 В і змінну напругу 220 В. При роботі в комплекті з тиристорними пускачами У21 або У22 схема відрізняється тим, що кнопки ручного управління комутують ланцюги джерела постійного ст руму 24 В, що розміщений в тиристорному пускачі.
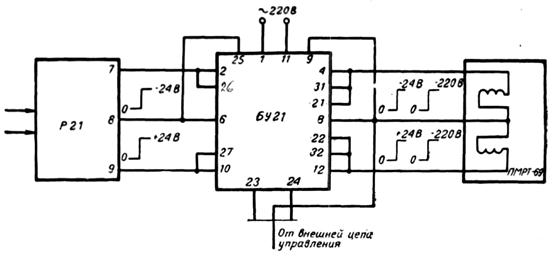
Рисунок 10.11 – Використання блоку БУ21
10.7.2 Блок управління аналогового регулятора БУ12
Блок призначений для забезпечення ручного управління навантаженням регулюючого блоку, безпоштовхового перемикання з ручного управління на автоматичне і навпаки. Здійснює комутацію ланцюгів навантаження регулюючого блоку Р12 і перетворює кут повороту потенціометру ручного управління в два синхронно змінюваних струмових сигналів.
Блок складається з (рисунок 10.12): перемикача управління 4, двох гальванічно не зв’язаних стабілізованих джерела напруги 2, спарений потенціометр ручного управління 3, два підсилювача 1 і джерело живлення 5. Перемикач управління 4 комутує ланцюги навантажень, підключає їх в режимі автоматичного управління (А) до вихідних ланцюгів аналогового регулюючого блоку (клеми 7, 10), а в режимі ручного управління (Р) – до вбудованого джерела струму. Регульовані джерела струму побудовані за схемами регульованих стабілізаторів струму на транзисторах 1, включених із загальними базами, що перетворюють напругу дільника 3 в струм.
В позиції «Автоматичне» (А) перемикач управління блоку БУ12 підключає ланцюги навантаження до вихідних ланцюгів аналогового регулюючого блоку Р12. В позиції «Ручне» (Р) зв’язок блоку Р12 з навантаженням розривається і навантаження підключається до регульваного джерела струму, за допомогою якого оператор управляє процесом вручну (рисунок 10.13). Одночасно за допомогою контактів, виведених на клеми 5, 6 блоку БУ12, включається реле, розташоване в блоці Р12. Це реле переключає ланцюги функціонального ЗЗ регулюючого блоку таким чином, що він переходить в режим слідкування за струмом, поданим на клеми 11, 12 і синхронізованим з струмом управління навантаженням. Завдяки цьому забезпечується безпоштовхове переключення регулятора з режиму ручного управління на режим автоматичного управління.

Рисунок 10.12 – Функціональна схема блоку БУ12
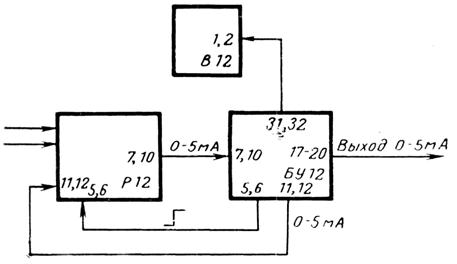
рисунок 10.13 – Використання блоку БУ12
10.8 Вимірюючий блок И04
Блок призначений для формування сигналів неузгодження між заданим значенням і алгебраїчною сумою до 4 промасштабованих вхідних сигналів з гальванічним розділенням.
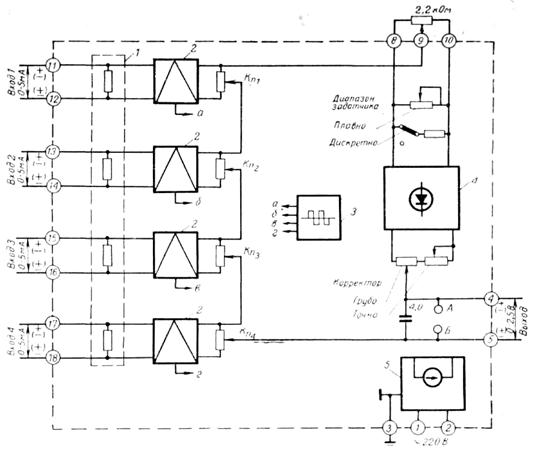
Рисунок 10.14 – Функціональна схема вимірюючого блоку И04
Виконує операцію підсумовування у відповідності з алгоритмом:
 ,
,
де  – безрозмірні значення, відповідно, вихідного сигналу, сигналу зовнішнього задатчика, сигналу вбудованого коректора і вхідного сигналу;
– безрозмірні значення, відповідно, вихідного сигналу, сигналу зовнішнього задатчика, сигналу вбудованого коректора і вхідного сигналу;
Kпі – масштабуючі коефіцієнти;
α – діапазон дії задатчика.
Функціональна схема блоку И04 (рисунок 10.14) містить вимірюючий ланцюг 1, чотири вузли гальванічного розділення 2, генератор 3 прямокутних коливань з частотою 10 кГц, стабілізатор 4 і джерело живлення 5. Сигнали на виході вузлів гальванічного розділення масштабуються за допомогою потенціометрів Kп і послідовно підсумовуються. До них додається напруга з мостової схеми, в плечі якої якої включені коректор і зовнішній потенціометричний задатчик.
Зовнішній вигляд панелі налаштувань блоку И04 наведений на рисунку 10.15.
На вхід блоку И04 можливо подавати струмові сигнали 0-5 мА будь-якої полярності, вихідний сигнал за напругою теж є двополярним ±2,5 В.
Робота блоку за принциповою схемою та методика розрахунку коефіцієнтів пропорційності Кпі детально розглянуті в лабораторній роботі №3 [X].
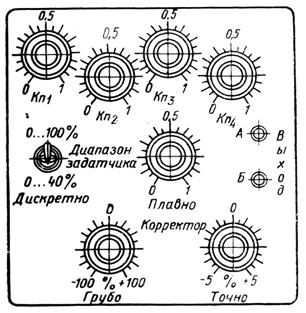
Рисунок 10.15 – панель налаштувань блоку И04
10.9 Алгебраїчний блок А04
Блок призначений для підсумовування до 4 вхідних сигналів з незалежним масштабуванням, гальванічним розділенням і використовується в АСР у випадках, коли його вихідний сигнал подається в інші блоки системи «Каскад» та на великі відстані.
Виконує операцію підсумовування у відповідності з алгоритмом:
 ,
,
де ІВХ, ІВИХ, ІСМ – вхідний, вихідний сигнали і сигнал зміщення, виражені в мА. Якщо сумарний сигнал менше нуля, ІВИХ = 0.
Функціональна схема блоку А04 (рисунок 10.16) містить вимірюючий ланцюг 1, чотири вузли гальванічного розділення 2, генератор 3 прямокутних коливань з частотою 10 кГц, стабілізатор 4, операційний підсилювач 5 і джерело живлення 6.
Сигнали на виході вузлів гальванічного розділення масштабуються за допомогою перемикачів Kп (дискретно) і потенціометрів Kп' (плавно) і послідовно підсумовуються. ОП перетворює одержану суму напруг в уніфікований струмовий сигнал. результат алгебраїчного додавання в позитивний діапазон струмів 0-5 мА.
Особливістю блоку А04 є однополярний вихідний струмовий сигнал, тому його сигнал зміщують на 50% у разі негативного результату алгебраїчного підсумовування, який потім необхідно компенсувати в наступних приладах (рисунок 10.18). Така схема використовується також, коли вхідних сигналів більше 4.
При включенні зміщення (наприклад, в регуляторах співвідношення) і з врахуванням його наступної компенсації вихідний сигнал блоку А04 змінюється в діапазоні –2,5...0...+2,5 мА (–50...0...+50%).

Рисунок 10.16 – Функціональна схема алгебраїчного блоку А04
Зовнішній вигляд панелі налаштувань блоку И04 наведений на рисунку 10.13.

Рисунок 10.17 – Панель налаштувань блоку А04
рисунок 10.18 – Схема використання блоку А04 із зміщенням вихідного сигналу
Робота блоку за принциповою електричною схемою та методика розрахунку коефіцієнтів пропорційності Кпі детально розглянуті в лабораторній роботі №4 [X].
10.10 Регулюючі блоки системи «Каскад»
10.10.1 блок регулюючий релейний Р21
блок призначений для роботи в в АСР в комплекті з ВМ постійної швидкості і формування ПІ-закону регулювання за виразом:
 ,
,
де KП – коефіцієнт передачі блоку;
ТДФ – постійна часу демпфера;
ТИ – постійна часу інтегрування.
Крива розгону цього релейно-імпульсного регулятора разом із ВМ постійної швидкості зображена на рисунку 8.3.
Величина коефіцієнта пропорційності блока КП розраховується як відношення переміщення ВМ за час першого імпульсу включення Δ М 1 до сигналу неузгодження e:
 .
.
де TBM – постійна часу ВМ (час сервомотору);
VCB – швидкість зворотного зв’язку.
Блок Р21 працює в комплекті з будь-якими ВМ постійної швидкості, що мають час сервомотору TBM від 10 до 630 секунд (рисунок 10.19).
Рисунок 10.19 – Реалізація П-складової ВМ різної швидкості
Тому органу налаштування коефіцієнта пропорційності КП на блоці Р21 немає, а є налаштування швидкості зв’язку VСВ, що пропорційна: обернено коефіцієнту передачі регулятора KР і прямо – швидкості сервомотору ТВМ та коефіцієнтам передачі датчика KД і ВМ KВМ:
постійна часу інтегрування (час ізодрому) ТИ графічно визначається по кривій розгону, як час подвоєння першого переміщення ВМ (рисунок 8.3).
Блок Р21 (рисунок 10.20) складається з: вимірюючого ланцюга 1, ланки головного негативного зворотного зв’язку (ГНЗЗ) 2, ланки додаткового позитивного зворотного зв’язку (ДПЗЗ) 3, трипозиційного реле 4, світлових індикаторів 5, джерела живлення 6, ОП 7.

Рисунок 10.20 – Функціональна схема регулюючого блоку Р21
Вимірюючий ланцюг містить вхідні резистори для перетворення вхідних струмових сигналів в напругу та їх підсумовування без гальванічного розділення: вхід 1 і вхід 3 – 0-5 мА, вхід 2 – 0-20 мА, вхід 4 – 0...±2,5 В (від блоку И04). На вхід 5 подають сигнал ±24 В постійної напруги від інших регуляторів.
Сигнал неузгодження e вимірюється на клемах 12, 13 і гніздах А, Б. Перемичка 13-20 підключає вхідну ланку до входу ОП.
Вхідний сигнал згладжується від завад за допомогою інтегруючої RC -ланки, постійна часу якої змінюється потенціометром ТДФ = RДФ∙CДФ. Ця інерційна ланка (демпфер) не пропускає через себе сигнали, що мають частоту, більшу її частоти зрізу. Сигнали теплотехнічних параметрів мають дуже низьку частоту і тому їх амплітуда у демпфері не змінюється. 

В прямому ланцюзі блоку встановлений ОП типу УВ-41, тому закон регулювання формується в ланці його ГНЗЗ. Нелінійний елемент з трипозиційною релейною характеристикою з зонами нечутливості Δ і повернення Δ В типу УР-2, призначений для управління пусковим пристроєм ВМ. Спрацювання релейного елементу візуально оцінюється світловими індикаторами «Больше» і «меньше».
З рівняння баластної ланки для ПІ-регулятора без охоплення ВМ зворотнім зв’язком (розділ 6) відомо, що для формування ПІ-закону разом з ВМ постійної швидкості в ланці ЗЗ повинна знаходитися інерційна ланка першого порядку, що реалізується пасивною RC -ланкою у вузлі 2.
Ланка ГНЗЗ має різні постійні часу заряжання та розряжання конденсатора. Для роз’єднання ланцюгів зарязаряжання і розряджання використовується електронний ключ на неоновій лампі (це газорозрядний прилад, що має R = ∞ у відключеному стані і незначний опір у включеному). Лампа вмикається і стає провідником при напругах, більших 90 В, і є вимикається при менших напругах.
Особливістю релейного підсилювача УР-2 є незмінність його статичної характеристики (рисунок 10.21), тому для налаштування величин зон нечутливості і повернення в широких межах використовується додаткові позитивні і негативні ЗЗ.

Рисунок 10.16 – статична характеристика трипозиційного реле
Ширину зони нечутливості Δ змінює потенціометр «зона», зони повернення Δ В – потенціометр «tИ» (час імпульсу). Час імпульсу встановлюють таким, щоб за одну хвилину ВМ включався не більше 6-10 разів.
Органами контролю блоку є гнізда А, Б (сигнал неузгодження ε), Б, Г – контроль роботи ланки ЗЗ, Б, Д і Б, В – контроль додаткових ланок ЗЗ (рисунок 10.21). Світлові індикатори контролюють роботу блока в цілому.
Потенціометри «Демпфер», «Імпульс», «Зона» плавно змінюють налаштування блоку, а перемикачі «ТИ» (Час ізодрому) і «VCB» (Швидкість зв’язку) – дискретно.

рисунок 10.21 – Панель налаштування блоку Р21
10.10.2 Регулюючий блок з аналоговим вихідним сигналом Р12
Блок Р12 призначений для роботи в каскадних АСР в якості коригуючого регулятора або для роботи в комплекті з ВМ пропорційної дії для формування ПІД-закону
 .
.
Випускається блок у трьох модифікаціях для регулювання повільних, середніх і швидкоплинних технологічних процесів.
Блок складається з (рисунок 10.22): 1 – вимірюючої вхідної ланки, на якій перетворюється в напругу 3 струмових сигнали і четвертий струмовий сигнал від блоку управління, виконується підсумовування всіх сигналів, 2, 4 – операційні підсилювачі прямої ланки, 3 – обмежувач вихідного сигналу, 5 – джерело живлення, 6 – реле для безпоштовхового переключення з ручного в автоматичний режим.
Робота блоку за принциповою схемою:
Вхідні сигнали надходять на клеми 14-18, вихідний сигнал від блоку И04 подається на клеми 14, 15. Входи 1, 2, 3 при відсутності сигналів від датчиків закорочуються перемичками.
Якщо не використовується вимірюючий блок И04, то клеми 14, 15 закорочують, вхідні сигнали будуть гальванічно зв’язані і при будь-якій їх несправності блок перестає працювати в цілому. Вхідний сигнал надходить на підсилювач 2, потім через обмежувач вихідного сигналу 3 на підсилювач 4. Така схема використана тому, що ВМ пропорційної дії не мають кінцевих та шляхових обмежувачів ходу, наприклад, електричний нагрівач (тен) не має обмежувачів потужності.
Оскільки обмежувач виконаний на пасивних елементах (діодно-функціональних перетворювачах), то він підключений до ОП 4 з великим вхідним опором, що працює в режимі повторювача з коефіцієнтом передачі, рівним одиниці.
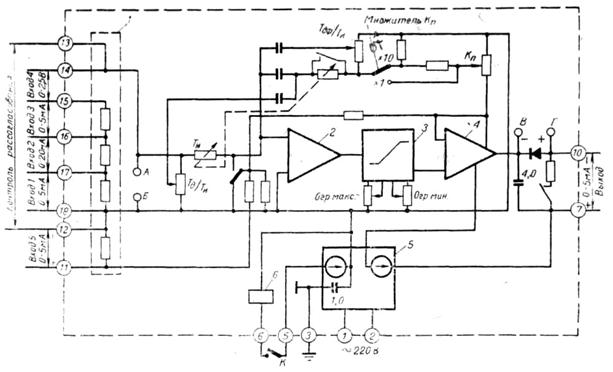
Рисунок 10.22 – Функціональна схема блоку Р12
З теорії побудови АР (розділ 6) відомо, що для формування ПІД-закону в ланці ЗЗ повинна знаходитись інерційна ланка другого порядку. Схема складної RC -ланки другого порядку в ЗЗ не дозволяє розділити параметри налаштування КП, ТИ, ТДФ, тому блок Р12 має наступні органи налаштування, частина яких зв’язані між собою:
1. «КП»з множником ×1, ×10 – коефіцієнт пропорційності блоку;
2. «ТИ» – постійна часу інтегрування;
3. «ТД/ТИ» – постійна часу диференціювання;
4. «ТДФ/ТИ» – постійна часу демпфера;
5. «Обмеження max», «обмеження min».
В блоці реалізоване безпоштовхове перемикання з ручного в автоматичний режим роботи. Оскільки ВМ пропорційної дії є безінерційним, то можливі великі поштовхові впливи на об’єкт при переключенні блоку з ручного в автоматичний режим роботи в разі, якщо в момент переключення ε ≠ 0. для безпоштовхового переключення необхідно спочатку вручну встановити нульове значення сигналу неузгодження ε, а потім переключити режим роботи блоку з автоматичного в ручний.
Схема підключення регулюючого блока Р12 і блока управління БУ12 для безпоштовхового переключення режиму роботи наведена на рисунку 10.18.
. 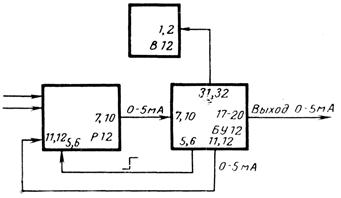
рисунок 10.18 – підключення блоку БУ12 для безпоштовхового переключення
В автоматичному режимі вихідний струмовий сигнал блоку Р12 керує навантаженням RН за ПІД-законом, блок управління БУ12 лише пропускає через себе цей сигнал.
В ручному режимі в блоці БУ12 замикаються контакти реле К, надходить струм на обмотку реле 6 блока Р12 і його контактами блок переключається в режим повторення сигналу від першого задатчика блоку БУ12, а другий, синхронно працюючий з першим, ручний задатчик блоку БУ12 підключається до навантаження (ВМ) і управляє ним.
Реле 6 має три пари контактів:
– Перша пара контактів реле переключається і охоплює ОП жорстким ЗЗ (резистором), тобто блок перемикається в режим повторювача з КП = 1.
– Друга пара контактів реле закорочує високоомні резистори ланки ЗЗ для швидкого перезаряджання конденсаторів ланки ЗЗ і готовності блоку в будь-який момент при переключенні в автоматичний режим формувати ПІД-закон з початковими умовами на момент переключення, тобто безпоштовхово.
– Третя пара контактів реле підключає вихід операційного підсилювача 4 до резистора еквівалентного навантаження.
Оскільки при переході з ручного в автоматичний режим необхідно уникати поштовхові перехідні процеси, то спочатку вручну встановлюють нульове значення ε за індикатором В12 і лише після цього перемикають блок в автоматичний режим.
Вручну встановлювати нульове значення сигналу неузгодження ε досить важко, особливо для складних динамічних об’єктах, тому були розроблені схеми динамічного узгодження регулятора для його безпоштовхового включення з використанням блоків УКТС. Блоки УКТС дозволяють запам’ятати значення початкового неузгодження ε, відняти його від поточного значення, щоб при переключенні штучно створити ε (0) = 0 і потім плавно відновити сигнал неузгодження.
10.11 Приклад технічної реалізації системи автоматичного регулювання потужності енергоблоку.
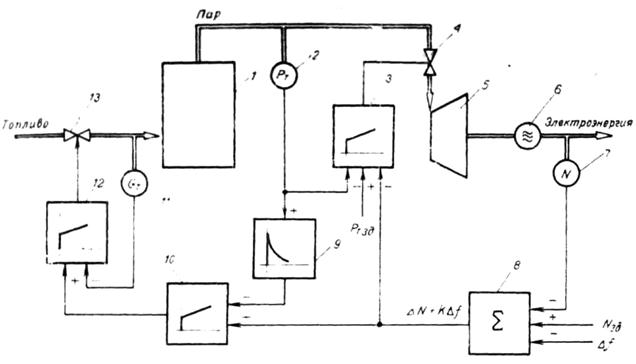
Рисунок 10.19 – структурна схема АСР потужності теплового енергоблоку
На рисунку 10.19 зображена структурна схема теплового енергетичного блока, в якому 1 – парогенератор, 2, 7, 11– датчики тиску пари, електричної потужності, витрати палива, 3 – регулятор тиску пари перед турбіною, 4 – головна парова засувка, 5 – парова турбіна, 6 – електрогенератор, 8 – суматор, 9 – диференціатор, 10 – регулятор потужності, 12 – регулятор палива, 13 – регулюючий орган.
Енергоблок – це комплекс із двох технологічних агрегатів, за допомогою яких виробляється електроенергія. Перший – паровий котел або атомний реактор, призначений для вироблення пари потрібних параметрів (тиску і температури). В паровому котлі енергія пари створюється внаслідок перетворення хімічної енергії палива, в атомному реакторі – енергії атомних реакцій (керованих ланцюгових реакцій перетворення елементів).
Параметри пари для теплового блоку 300 МВт є надкритичними, температура перед турбіною біля 530 ºC, тиск біля 250-270 кгс/см2 (25-27 Мпа). вищі температуру і тиск вже не витримують стальні трубопроводи, навіть виконані з високоякісних аустенітно-перлітних сталей.
Другий агрегат енергоблоку – турбіна, що перетворює потенційну енергію пари в кінетичну енергію ротора, до якого приєднаний турбогенератор, який і видає електроенергію в мережу.
Система регулювання потужності енергоблоку одержує завдання по потужності, порівнює її з поточною потужністю N, а якщо енергоблок працює в режимі стабілізації частоти 50 Гц, то ще й вводиться і сигнал з відхилення частоти Δ f з своїм коефіцієнтом K, і на виході суматора 8 одержуємо сигнал неузгодження:
ε = Δ N + K∙ Δ f.
Головний паровий колектор, по якому пара з парогенератора надходить до парової турбіни, є буферною ємністю, в якій запас пари достатній для вироблення енергії в турбіні на протязі короткого часу і використовується для компенсації короткочасних збурень за потужністю блоку.
Довготривалі збурення блоку за потужністю компенсуються переведенням парогенератора в новий режим генерування пари, причому постійна часу парогенератора або атомного реактора за каналом регулювання тиску пари на порядок більша за постійну часу головного парового колектора.
У зв’язку з цим в каскадній АСР потужності блоку передбачені два контури регулювання:
1. Швидкодіючий контур автоматичного регулювання (внутрішній), в якому міститься регулятор тиску пари в головному паровому колекторі 3.
2. Інерційний контур (зовнішній) автоматичного регулювання тиску пари зміною потужності парогенератора.
сигнал неузгодження за потужністю ε надходить на інерційний контур регулювання, змінює витрату (подачу палива), і котел поступово починає змінювати параметри пари в паровому колекторі. Для збільшення швидкості зміни навантаження на регулятор потужності 10 також подається похідна за тиском пари.
На рисунку 10.20 наведена схема КТЗ АСР потужності з використанням приладів системи «Каскад». Особливості використання цих приладів:
1. В системі «Каскад» використовуються датчики з уніфікованими струмовими сигналами, тому, наприклад, для вимірювання температури необхідно використовувати термопари і нормуючі перетворювачі для одержання уніфікованих сигналів.
2. Для захисту АСР від обриву лінії використовується діодно-захисні пристрої В01. Коли потрібно один струмовий сигнал надати декільком користувачам, то їх вхідні резистори включаються послідовно, а паралельно до кожного з них включаються діодно-захисні пристрої В01.
Регулятор тиску пари містить вимірюючий блок И04, регулюючий блок з імпульсним вихідним сигналом Р21, В21 – узгоджувальний блок, БУ21 – блок управління (перемикає з ручного в автоматичний режим і навпаки), пусковий пристрій – магнітний контактор реверсивний (МКР), МУТ – механізм управління турбіною (ВМ) – це електрогідравлічний привід головної парової засувки.
Регулятор палива теж зібраний на регулюючому блоці Р21. В ньому не використовується вимірюючий блок И04, тому що сигнал неузгодження формується безпосередньо в регулюючому блоці як різниця між сигналом завдання від корегуючого регулятора і сигналом за витратою палива.
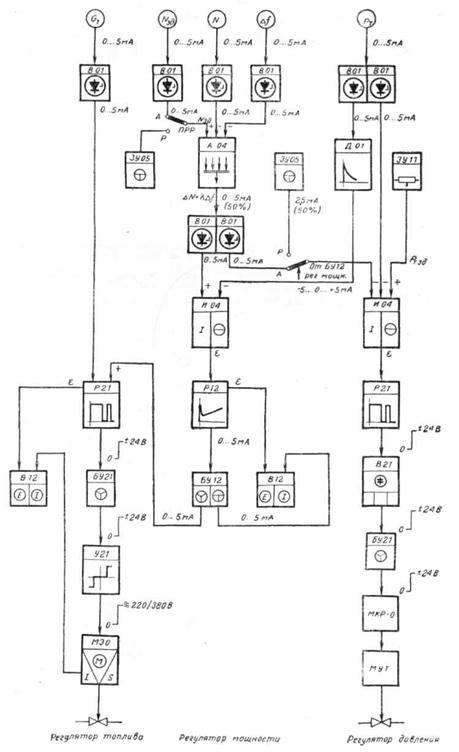
Рисунок 10.20 – Схема комплексу технічних засобів (КТЗ) автоматизації для реалізації АСР потужності теплового енергоблоку
Як і в попередньому випадку, далі регулюючий сигнал надходить на блок управління, а пристрій В21 відсутній, тому що пусковий пристрій У21 не має індукційного опору.
Примітка: регулятор палива, охоплений жорстким ЗЗ, формує П-закон регулювання з мінімальним часом перехідного процесу регулювання, хоча й з статичною похибкою регулювання, тому корегуючий сигнал дозволяє звести цю похибку регулювання до мінімума.
Пусковим пристроєм є тиристорний підсилювач У21, що відноситься до складу системи приладів «Каскад». Підсилювач У21 дозволяє управління трифазними електродвигунами потужністю до 3-4 кВт, його вхідним сигналом є сигнал =24 В, вихідним сигналом – трифазна напруга ~380 В. Реверс ВМ відбувається зміною чергування фаз в трифазному електродвигуні.
Положення РО (а точніше ВМ) перетворюється в струмовий сигнал вбудованим струмовим датчиком положення. Оператор визначає сигнал розбалансу ε і положення РО М за допомогою індикатора В12.
Регулятор потужності зібраний на регулюючому блоці з аналоговим вихідним сигналом типу Р12. На його вхід надходить сигнал неузгодження ε, що складається із поточної потужністі Nn, NЗД – завдання на потужність, Δ ε – сигнал корекції за відхиленням частоти від 50 Гц, і сигнал похідної тиску пари в колекторі РТ', який формується блоком диференціювання Д01. Сигнал з виходу вимірюючого блоку И04 надходить на регулюючий блок Р12 і через блок управління БУ12, як завдання, на регулятор палива.
Особливості схеми:
Перемикачі з автоматичного до ручного режиму роботи використовуються при автономній роботі енергоблоку. перший перемикач використовують для ручної зміни завдання регулятору потужністі задатчиком ЗУ05. Другий перемикач використовується для ручної зміни сигналу завдання регулятору тиску пари задатчиком ЗУ05.
11 Електрична уніфікована система приладів автоматичного регулювання «Каскад-2»
11.1 Склад апаратури системи «Каскад-2»
а) регулюючі прилади
 Р17 – регулюючий блок з аналоговим вихідним сигналом, сучасний аналог блоку Р12. Підсумовує до 4 вхідних сигналів з гальванічним розділенням всіх сигналів, формує сигнал неузгодження та ПІД-закон регулювання; двобічно обмежує вихідний аналоговий струмовий сигнал.
Р17 – регулюючий блок з аналоговим вихідним сигналом, сучасний аналог блоку Р12. Підсумовує до 4 вхідних сигналів з гальванічним розділенням всіх сигналів, формує сигнал неузгодження та ПІД-закон регулювання; двобічно обмежує вихідний аналоговий струмовий сигнал.
 Р27 – підсумовує і гальванічно розділяє до 4 вхідних сигналів, формує сигнал неузгодження та ПІД-закон регулювання разом з ВМ постійної швидкості, з імпульсним вихідним сигналом.
Р27 – підсумовує і гальванічно розділяє до 4 вхідних сигналів, формує сигнал неузгодження та ПІД-закон регулювання разом з ВМ постійної швидкості, з імпульсним вихідним сигналом.
 Р28 – формує ПІ-закон регулювання, виконує такі ж функції, що й блок Р27, і додатково має дистанційне автопідстроювання параметрів налаштування.
Р28 – формує ПІ-закон регулювання, виконує такі ж функції, що й блок Р27, і додатково має дистанційне автопідстроювання параметрів налаштування.
б) Перетворювачі сигналів
1) Блоки статичного перетворення сигналів (миттєвого перетворення):
 А05 – алгебраїчний блок для підсумовування і масштабування 4 вхідних сигналів з гальванічним розділенням, двобічного обмеження вихідного струмового сигналу.
А05 – алгебраїчний блок для підсумовування і масштабування 4 вхідних сигналів з гальванічним розділенням, двобічного обмеження вихідного струмового сигналу.
 А06 – блок-розмножувач струмового сигналу з гальванічним розділенням і двобічним обмеженням.
А06 – блок-розмножувач струмового сигналу з гальванічним розділенням і двобічним обмеженням.
Поиск по сайту: