АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Элементы линейной алгебры
1. Операции над матрицами. Свойства операций.
Матрицей, размера n*m называется прямоугольная таблица чисел, содержащая m строк и n столбцов.
Операции:
1) Сложение. Складываются матрицы только одного размера. Получается матрица того-же размера.
2) Умножение матрицы на число. Умножать можно любую матрицу на число. Полученная матрица того-же размера.
3) Произведение матриц. Произведение A*B определено, если число столбцов A = числу строк матрицы B.
Свойства:
1) A + B = B + A
2) (A + B) + C = A + (B + C)
3) A + 0 = A
4) α(A + B) = αA + αB
5) α(β*A) = (α β)*A
6) (α + β)*A = α*A + A*β
7) A*0 = 0
8) A*B ≠ B*A
9) (A*B)*C = A*(B*C)
10) (A+B)*C = A*C + B*C
11) α(A*B) = (α*A)*B = A*(α*B)
12) A*E = E; E*A = A E – единичная матрица.
свойства транспонирования:
1) (At)t = A
2) (A + B)t = At + Bt
3) (A*B)t = Bt * At
4) (α*A)t = α*At
2. Определители 2-го и 3-го порядков. Минор и алгебраическое дополнение. Определитель n-го порядка. Свойства определителей.
Определителем матрицы второго порядка, или определителем второго порядка, называется число, которое вычисляется по формуле:
Определителем матрицы третьего порядка, или определителем третьего порядка, называется число, которое вычисляется по формуле:

Минором Mij элемента aij называется определитель матрицы, полученной из матрицы A = (aij) вычёркиванием i-ой строки и j-го столбца.
Например, есть матрица: Предположим, надо найти минор 


Получаем 
Алгебраическим дополнением Aij элемента aij называется число Aij = (-1)i+j * Mij
Определитель n-ого порядка есть сумма произведений элементов 1 строки на их алгебраические дополнения.
Свойства:
1) Определитель равен сумме произведений элементов какого-либо столбца (или строки) на их алгебраические дополнения.

 и т.д.
и т.д.
2) |A| = |At|
3) Если в определителе поменять местами любые 2 строки (или столбца), то определитель поменяет знак на противоположный.
4) Если в определителе к элементам одной строки прибавить элементы другой строки, умноженные на число, то определитель не изменится.
5) Сумма произведений элементов одной строки на алгебраические дополнения другой строки = 0.
6) |A*B| = |A| * |B|
3. Обратная матрица. Теорема существования обратной матрицы.
Обратной матрицей к квадратной матрице А порядка n называется такая квадратная матрица B порядка n, что A*B = E и B*A = E. Если существует обратная матрица, то она единственна.
B = A-1 – обратная матрица.
Теорема: Обратная матрица A-1 для A существует тогда и только тогда, (<=>) когда |A| ≠ 0 (когда A – невырожденная матрица)
Доказательство:
4. Системы линейных уравнений. Матричная запись системы. Формулы Крамера.
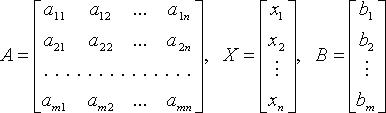
Системой m линейных уравнений с n неизвестными называется система вида

AX = B D - расширенная матрица
Формулы Крамера: 
Пример:
x1 + x2 + x3 + x4 = 5,
x1 + 2x2 - x3 + 4x4 = -2,
2x1 - 3x2 - x3 - 5x4 = -2,
3x1 + x2 +2x3 + 11 x4 = 0.
Решение. Главный определитель этой системы
значит, система имеет единственное решение. Вычислим вспомогательные определители ∆ i (i = 1 - 4), получающиеся из определителя D путем замены в нем столбца, состоящего из коэффициентов при xi, столбцом из свободных членов:

Отсюда x1 = D 1/D = 1, x2 = D 2/D = 2, x3 = D 3/D = 3, x4 = D 4/D = -1
5. Однородная система линейных уравнений и свойства ее решений.
Однородной системой m линейных уравнений с n неизвестными называется система вида
Свойства решений:
Теорема 1. Линейная комбинация решений однородной системы является решением системы.
Теорема 2. Разность двух решений неоднородной системы является решением однородной системы.
Теорема 3. Сумма решения однородной системы с решением неоднородной системы есть решение неоднородной системы.
6. Решение систем методом Гаусса.
Метод Гаусса заключается в последовательном исключении неизвестных с помощью следующих преобразований:
1) Умножение уравнения на число, отличное от нуля.
2) Прибавление к одному уравнению другого, умноженного на число.
3) Перемена местами уравнений.
4) Замена местами неизвестных.
С помощью этих преобразований система сводится к системе трапецеидального вида.
Поиск по сайту: