АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Гироскоп.Вывод формулы частоты прецессии гироскопа
Гироскоп - устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено в ИнСиОт. Вывод: M=L/t (М-момент силы);
(am / JΩ) g; - маховик гироскопа будет совершать медленное вращение (прецессию) в горизонтальной плоскости - =Ω L=JΩ(Ω– угловая частота); М = [a, F]; F=mg; L/t = [Ω, L]; [ωo, JΩ] = - [mg, a];
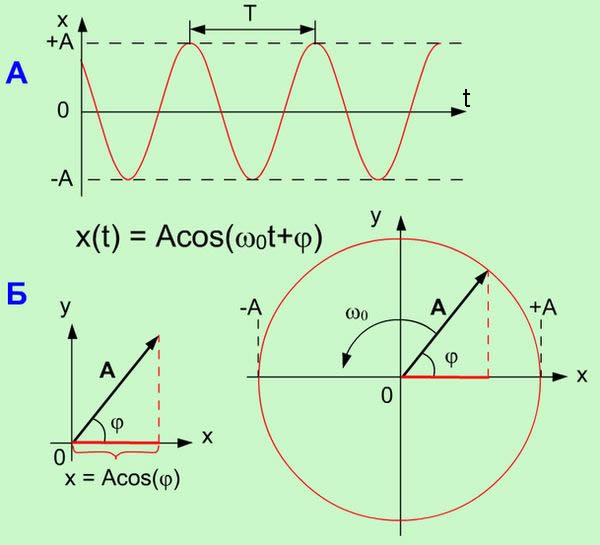
Дифференциальное уравнение гармонических колебаний и его решение. Основные характеристики гармонических колебаний. Векторное изображение колебаний. Гармонические колебания груза на пружине, математического и физического маятников. Энергия гармонических колебаний(на примере пружинного маятника) Графики зависимости смещения, скорости, ускорения, кинетической и потенциальной энергии колебаний от времени.
(d^2)s/d(t^2)+ωs=0; (d^2)s/d(t^2)= -A (ω^2)(sin^2)(ωt+φ); ds/dt= Acosx(ωt+φ); s(t)=Asinx(ωt+φ)-уравнение гармонических колебаний. Колебания вдоль оси х. Бывают свободные и вынужденные.
Для расчета Гарм.колеб обычно рассматривают плоскость векторного изображения как комплексную плоскость с вращающемся вектором А, c соотношением z=A(cos ωt+isin ωt)
Поиск по сайту: