АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Задача Д4
(тема: “Принцип возможных перемещений”)
Механизм, расположенный в горизонтальной плоскости, находится под действием приложенных сил в равновесии; положение равновесия определяется углами  ,
,  ,
,  ,
,  ,
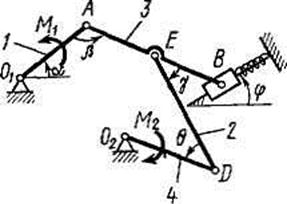
,  (рис. Д4.0-Д4.9, табл. Д4а и Д4б). Длины стержней механизма (кривошипов) равны: l 1 = 0,4 м, l 4 = 0,6 м (размеры l 2 и l 3 произвольны); точка E находится в середине соответствующего стержня.
(рис. Д4.0-Д4.9, табл. Д4а и Д4б). Длины стержней механизма (кривошипов) равны: l 1 = 0,4 м, l 4 = 0,6 м (размеры l 2 и l 3 произвольны); точка E находится в середине соответствующего стержня.
На ползун В механизма действует сила упругости пружины  ;численно
;численно  , где с – коэффициент жесткости пружины,
, где с – коэффициент жесткости пружины,  – ее деформация. Кроме того, на рис. Д4.0 и Д4.1 на ползун D действует сила
– ее деформация. Кроме того, на рис. Д4.0 и Д4.1 на ползун D действует сила  , а на кривошип О 1 А – пара сил с моментом М;на рис. Д4.2- Д4.9 на кривошипы O 1 A и О 2 D действуют пары сил с моментами M 1 и М 2.
, а на кривошип О 1 А – пара сил с моментом М;на рис. Д4.2- Д4.9 на кривошипы O 1 A и О 2 D действуют пары сил с моментами M 1 и М 2.
Определить, чему равна при равновесии деформация пружины, и указать, растянута пружина или сжата.
Значения всех заданных величин для рис. Д4.0-Д4.4 приведены в табл. Д4а, а для рис. Д4.5-Д4.9 в табл. Д4б. В этих таблицах сила Q дана в ньютонах, а моменты М, M 1, M 2 – в ньютоно-метрах.
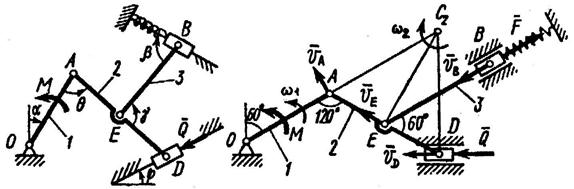
Построение чертежа начинать со стержня, направление которого определяется углом ; для большей наглядности ползун с направляющими и пружину изобразить так, как в примере Д4 (см. рис. Д4, а также рис. Д4.10б). Если на чертеже решаемого варианта задачи прикрепленный к ползуну В стержень окажется совмещенным с пружиной (как на рис. Д4.10а), то пружину следует считать прикрепленной к ползуну с другой стороны (как на рис. Д4.10б, где одновременно иначе изображены направляющие).
Перед выполнением задания прочтите по учебнику тему: «Принцип возможных перемещений».
Ответьте на вопросы:
1. Как определяется число степеней свободы системы?
2. Что такое обобщенные координаты?
3. Что называется возможными перемещениями системы?
4. Формулы для вычисления элементарной работы силы на возможном перемещении (сравните с формулами, которые применили в задаче Д4).
5. Какие связи называются идеальными?
6. Сформулируйте принцип возможных перемещений для системы и запишите соответствующее уравнение.
7. Запишите уравнение мощностей, эквивалентное принципу возможных перемещений.
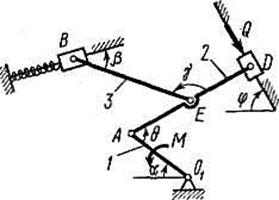 Рис. Д4.0
Рис. Д4.0
| 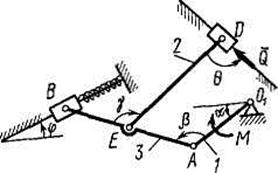 Рис. Д4.1
Рис. Д4.1
| |
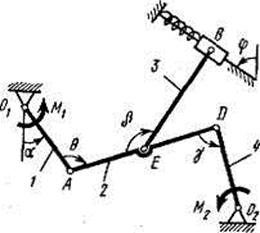 Рис. Д4.2
Рис. Д4.2
| 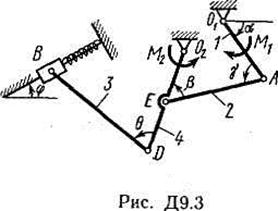 Рис. Д4.3
Рис. Д4.3
| |
 Рис. Д4.4
Рис. Д4.4
|  Рис. Д4.5
Рис. Д4.5
| |
 Рис. Д4.6
Рис. Д4.6
|  Рис. Д4.7
Рис. Д4.7
| |
|
Рис. Д4.8
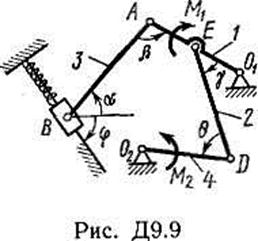 Рис. Д4.9
Рис. Д4.9

 , направленным в сторону перемещения.
Число степеней свободы. Число независимых перемещений точек системы называется числом степеней свободы системы. Если система состоит из n точек, на которые наложены k геометрических (не накладывающих ограничений на скорости точек) связей, то она имеет
, направленным в сторону перемещения.
Число степеней свободы. Число независимых перемещений точек системы называется числом степеней свободы системы. Если система состоит из n точек, на которые наложены k геометрических (не накладывающих ограничений на скорости точек) связей, то она имеет  степеней свободы. В дальнейшем связи считаются геометрическими. Следовательно, чтобы задать положение такой системы в любой момент времени, не нужно задавать все координаты всех точек, а надо задать только независимые параметры.
Независимые параметры, число которых равно числу степеней свободы, и которые однозначно определяют положение всей системы в любой момент времени, называются обобщенными координатамии обозначаются
степеней свободы. В дальнейшем связи считаются геометрическими. Следовательно, чтобы задать положение такой системы в любой момент времени, не нужно задавать все координаты всех точек, а надо задать только независимые параметры.
Независимые параметры, число которых равно числу степеней свободы, и которые однозначно определяют положение всей системы в любой момент времени, называются обобщенными координатамии обозначаются
 ,
,  ,…,
,…,  ,
где s – число степеней свободы. В качестве обобщенных координат можно выбрать декартовы координаты точек, углы поворота тел и т.д.
,
где s – число степеней свободы. В качестве обобщенных координат можно выбрать декартовы координаты точек, углы поворота тел и т.д.
 .
(Элементарная работа на возможном перемещении обозначается
.
(Элементарная работа на возможном перемещении обозначается  ). Все встречавшиеся ранее связи (шарниры, поверхности, нити, подшипники и т.д.) – идеальные при отсутствии трения. Если трение имеется и работа силы трения отлична от нуля, то сила трения включается в число активных сил.
Принцип возможных перемещений. Формулировка: для равновесия системы с геометрическими идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех активных сил, действующих на точки системы, на любом возможном перемещении системы из данного положения была равна нулю:
). Все встречавшиеся ранее связи (шарниры, поверхности, нити, подшипники и т.д.) – идеальные при отсутствии трения. Если трение имеется и работа силы трения отлична от нуля, то сила трения включается в число активных сил.
Принцип возможных перемещений. Формулировка: для равновесия системы с геометрическими идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех активных сил, действующих на точки системы, на любом возможном перемещении системы из данного положения была равна нулю:
 , (1)
или (с учетом выражений для элементарной работы силы, см. задачу Д4)
, (1)
или (с учетом выражений для элементарной работы силы, см. задачу Д4)
 ,
а также
,
а также
 . (2)
В (2) выполнено деление на
. (2)
В (2) выполнено деление на  и поэтому суммируются мощности сил.
и поэтому суммируются мощности сил.