АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Сложное сопротивление
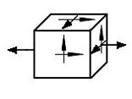
72) На схеме, изображенной на рисунке, наиболее опасной точкой является ###.

а) точка 1
б) точка 2
в) точка 3
г) точка 4
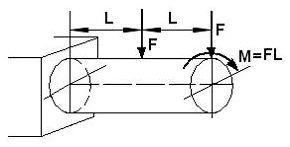
73) Пусть заданы  - допускаемое напряжение, W – осевой момент сопротивления и величина силы F. Тогда длина стержня L из условия прочности
- допускаемое напряжение, W – осевой момент сопротивления и величина силы F. Тогда длина стержня L из условия прочности  будет удовлетворять неравенству ###.
будет удовлетворять неравенству ###.

а)  б)
б)  в)
в)  г)
г) 
74) Продольная сила N и изгибающие моменты Мy и Мx в опасном сечении балки соответственно равны ###.

а)

б)

в)

г)

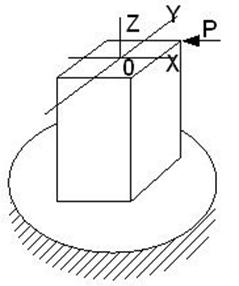
75) Для стержня, изображенного на рисунке, вид сложного сопротивления ###.

а) косой изгиб
б) изгиб с кручением
в) общий случай сложного сопротивления
г) внецентренное сжатие
76) Условие прочности для стержня, изображенного на рисунке, имеет вид ###.

а)  б)
б) 
в)  г)
г) 
77) Условие прочности для опасной точки с использованием формулы для эквивалентного напряжения  имеет вид ###.
имеет вид ###.
а)  б)
б) 
в)  г)
г) 
78) Положение нейтральной линии балки круглого поперечного сечения изображено линией ###.

а) 2-2
б) 4-4
в) 3-3
г) 1-1
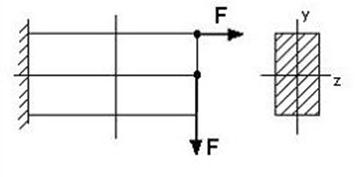
79) Для стержня, изображенного на рисунке, вид сложного сопротивления ###.

80) Опасными точками в указанном сечении являются ###.

а) В и D
б) А и С
в) D и C
г) A и B
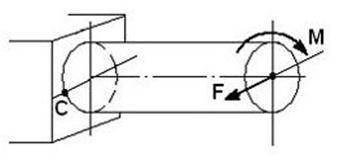
81) Для стержня, изображенного на рисунке, вид сложного сопротивления ###.
82) При пространственном изгибе положение нейтральной линии в сечении А-А изображено линией ###.

а) 2-2
б) совпадающей с осью Х
в) 3-3
г) 1-1
83) Если силы лежат в вертикальной плоскости симметрии стержня, тогда правильные направления продольной силы N и изгибающего момента Мz в поперечном сечении будут ###.
а) б)


в) г)


84) Напряженное состояние в точке D имеет вид ###.

а) б)


в) г)


85) В поперечном сечении стержня, изображенного на рисунке, действуют внутренние силовые факторы ###.

а) N и Mz
б) Mz и Mкр
в) N и My
г) Qy и Mz
86) В сечении А-А, наиболее опасными являются точки ###.

а) 2 и 4
б) 1 и 4
в) 1 и 3
г) 2 и 3
87) Напряженное состояние, возникающее в точке С опасного сечения имеет вид ###.
а) б) в) г)



88) Для стержня, изображенного на рисунке, вид сложного сопротивления ###.

89) Условие прочности для стержня, изображенного на рисунке, имеет вид ###.

а)  б)
б)  в)
в)  г)
г) 
90) В сечении А-А, наиболее опасными являются точки ###.

а) 2 и 4
б) 1 и 2
в) 1 и 3
г) 4 и 3
Приложение 20
Тесты для контроля знаний студентов по дисциплине детали машин
Рубежный контроль №1
1. Сборочной единицей является:
а) редуктор
б) болт
в) пружина
г) гайка
в) вал
2. Называть деталью следует изделие:
а) подшипник качения
б) муфта
в) ось
г) двигатель
д) карданный вал
3. Деталь – часть машины:
а) выполненная из однородного материала без сборочных операций
б) состоящая не более, чем из трех элементов, выполненных из одного материала
в) выполненная из разных материалов с применением одной или двух сборочных операций
г) состоящая из ряда элементов, выполненных из разных материалов
4. Разъемные соединения, которые:
а) допускают многократную разборку без ухудшения качества соединения
б) допускают однократную разборку без ухудшения качества соединения
в) допускают разборку после частичного или полного разрушения соединяемых деталей
5. По форме основной поверхности не существует резьбы:
а) эллиптической
б) конической
в) цилиндрической
6. Из перечисленных способов сборку соединений с натягом не производят:
а) с охлаждением втулки
б) запрессовкой с подогревом втулки
в) с охлаждением вала
г) с нагревом втулки
д) запрессовкой
7. Из перечисленных соединений следует отнести к неразъемным:
а) резьбовое
б) штифтовое
в) сварное
г) шпоночное
д) шлицевое
8. Из перечисленных качеств могут быть отнесены к достоинствам соединений сваркой:
а) наличие остаточных напряжений в деталях после сварки
б) низкая трудоемкость процесса сварки
в) высокая чувствительность к вибрационным нагрузкам
г) сложность сварки некоторых металлов
д) большая трудоемкость контроля качества шва
9. Из перечисленных качеств могут быть отнесены к числу недостатков соединений сваркой:
а) повышенная, в сравнении с заклепочными соединениями, прочность и плотность
б) высокая чувствительность к вибрационным нагрузкам
в) уменьшение массы сложных деталей при поэлементном их изготовлении с последующей сваркой
г) высокая производительность процесса сварки
д) малая трудоемкость сварки
10. Из перечисленных качеств к недостаткам клеевых соединений могут быть отнесены:
а) большая герметичность
б) возможность соединения тонкостенных деталей
в) возможность соединения неоднородных материалов
г) необходимость точной подгонки сопрягаемых поверхностей
д) низкая трудоемкость процесса склеивания
11. Взаимная неподвижность деталей в соединении с гарантированным натягом достигается за счет:
а) сил упругости
б) сил межмолекулярного сцепления
в) сил взаимного притяжения
г) сил трения
12. Из перечисленных качеств к недостаткам соединений с натягом следует отнести:
а) возможность восприятия больших нагрузок
б) низкая технологичность сборки соединяемых деталей
в) отсутствие специальных крепежных элементов
г) центрирование соединяемых деталей
д) большое рассеивание прочности соединения вследствие рассеивания посадочных размеров в пределах допуска
13. Для нормальной работы с кратковременными перегрузками при межосевом расстоянии между валами 2 м. наиболее предпочтительна передача:
а) клиноременная
б) зубчатая
в) червячная
г) плоскоременная
д) цепная
14. Способ передачи движения не за счет зацепления, а за счет сил трения в передаче:
а) червяком
б) клиноременной
в) зубчатой
г) цепной
д) зубчатоременной
15. Наименьшие габаритные размеры при прочих одинаковых условиях и режимах нагружения имеет передача:
а) цепная
б) клиноременная
в) зубчатоременная
г) зубчатая
д) плоскоременная
16. За счет зацепления, а не за счет сил трения, способ передачи движения в передаче:
а) канатовой
б) клиноременной
в) червячной
г) фрикционной
д)плоскоременной
17. Правильное наименование параметра Ft в формуле Ft=2T/d
а) радиальная сила (вдоль радиуса делительной окружности)
б) окружная сила (касательная к делительной окружности)
в) осевая сила (вдоль оси)
г) нормальная сила (перпендикулярная поверхности зуба)
18. Соотношение мощностей на ведущем (Р1) и ведомом (Р2) валах передачи:
а) Р1>Р2
б) Р1<Р2
в) Р1=Р2
19. Мощность передаваемая передачей при Т1=100 (Нм), n1=200 об/мин и КПД 0,95 равна:
а) 1988,4
б) 1788, 4
в) 1388,4
г) 1588,4
20. При частоте вращения ведущего вала n1 = 100 обмин и числе зубьев шестерни z1 = 20, колеса z2 = 100 частота вращения ведомого вала равна:
а) n2=30
б) n2=10
в) n2=40
г) n2=20
д) n2=15
Рубежный контроль №2
1. При перекрещивающихся валах следует использовать передачу:
а) цилиндрическую косозубую
б) цилиндрическую шевронную
в) червячную
г) цилиндрическую прямозубую
2. Довольно часто встречается Z1=1 в передаче:
а) червячной
б) косозубой цилиндрической
г) шевронной
д) прямозубой цилиндрической
е) конической прямозубой
3. Для передачи крутящего момента возможно применения прямозубых колес при расположении валов:
а) перекрещивающемся под прямым углом
б) перекрещивающемся под любым углом
в) параллельном
г) пересекающемся
4. Наибольшее распространение получил профиль зуба:
а) эвольвентный
б) циклоидный
в) прямолинейный
5. По форме зубчатых колес не существует:
а) тетраидальных
б) эллиптических
в) конических
г) цилиндрических
6. Гипоидная передача является разновидностью:
а) цилиндрической
б) реечной
г) конической
д) эллиптической
7. Преимуществом зубчатых колес, изготовленных из чугуна, не является:
а) возможность работы при бедной смазке
б) дешевизна
в) высокая прочность
г) технологичность
8. Нормальное зубчатое колесо с диаметром делительной окружности 100 мм. и модулем 5 мм. имеет зубьев:
а) 40
б) 100
в) 25
г) 20
д) 50
9. Чтобы зубчатые колеса могли быть использованы для передачи, у них должно быть непременно одинаковым:
а) модуль
б) диаметры
в) число зубьев
г) ширина
д) толщина зуба
10. Модуль нормального зубчатого колеса с диаметром делительной окружности 80 мм. и числом зубьев 20 равен:
а) m = 3 мм
б) m = 8 мм
в) m = 2 мм
г) m = 5 мм
д) m = 4 мм
11. С увеличением угла наклона зубьев фактические контактные напряжения:
а) не изменятся
б) уменьшатся
в) увеличатся
12. По форме нарезанной части червяка различают:
а) цилиндрические червячные передачи
б) глобоидные червячные передачи
в) конические червячные передачи
13. Формой профиля резьбы не существует цилиндрических червяков:
а) конволютных
б) эвольвентных
в) архимедовых
г) эллиптических
14. Червячные передачи имеют передаточное число в диапазоне:
а) U>800
б) U=8…80
в) U<1
г) U=80…800
15. Преимуществами червячных передач являются:
а) высокий КПД
б) компактность
в) возможность осуществления самотормозящейся передачи
г) большое передаточное число в одной ступени
д) дешевизна
16. Работоспособность червячной передачи лимитирует:
а) червяк или колесо в зависимости от конструкции передачи
б) червяк
в) червяк и червячное колесо в равной степени
г) червячное колесо
17. В выражении по определению передаточного числа червячной передачи (U=z2/z1) как называется параметр z1:
а) число зубьев ведущего элемента
б) число зубьев
в) число заходов червяка
г) число витков червяка, находящихся в зацеплении с зубьями колеса
18. Какое выражение для определения диаметра делительной окружности червяка справедливо:
а) da1=qm+2ham
б) d1=qm
в) df1=qm-2(h+c)
г) d1=z1m
19. При каком соотношении количества выделяемого (Q) и отводимого (Q1) тепла в закрытой червячной передаче ее работоспособность будет обеспечена:
а) при любом
б) Q>Q1
в) Q<Q1
20. К какому виду механических передач относятся зубчато-ременные передачи:
а) трением, с промежуточной гибкой связью
б) трением, с непосредственным касанием тел
в) зацеплением, с промежуточной гибкой связью
г) зацеплением, с непосредственным касанием тел
21. К какому виду механических передач относятся ременные передачи:
а) трением, с непосредственным касанием тел
б) зацеплением, с промежуточной гибкой связью
в) трением, с промежуточной гибкой связью
г) зацеплением, с непосредственным касанием тел
22. Цепные передачи относятся к виду механических передач:
а) зацеплением, с промежуточной гибкой связью
б) зацеплением, с непосредственным касанием тел
в) трением, с промежуточной гибкой связью
г) трением, с непосредственным касанием тел
23. Применение цепной передачи возможно при расположении валов:
а) параллельные
б) пересекающиеся под любым углом
в) пересекающиеся под прямым углом
г) перекрещивающиеся под прямым углом
д) перекрещивающиеся под любым углом
24. Оси предназначены для:
а) соединения различных деталей
б) поддержания вращающихся деталей и передачи момента к ним
в) поддержания вращающихся деталей
г) обеспечения синхронности работы отдельных деталей машин и механизмов
25. Валы предназначены для:
а) поддержания вращающихся деталей
б) соединения различных деталей
в) обеспечения синхронности работы отдельных деталей машины и механизмов
г) поддержания вращающихся деталей и передачи момента к ним
26. Основное отличие подшипников качения от подшипников скольжения в:
а) Большей нагрузочной способности на единицу ширины
б) Повышенных радиальных габаритах
в) Наличии промежуточных тел качения между сопрягающимися деталями
г) Большей точности центрирования деталей
27. Не существует класса точности подшипников качения:
а) 6 б) 2 в) 5 г) 1 д) 0
28. Только осевую нагрузку может воспринимать подшипник:
а) игольчатый
б) двухрядный сферический
в) конический
г) упорный
29. Отличие 0 класса точности подшипника от обозначенных номерами (6, 5, 4, 2) заключается:
а) в классификацию подшипников по точности не входит
б) имеет среднюю точность
в) имеет наивысшую точность
г) имеет наинизшую точность
30. Из приведенных муфт к жестким не относятся:
а) втулочная б) зубчатая в) фланцевая
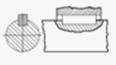
 31. На рисунке изображено зубчатое колесо с формой зуба:
31. На рисунке изображено зубчатое колесо с формой зуба:
а) косозубое
б) прямозубое
в) криволинейное
г) шевронное
32. Изготовленное без смешения прямозубое цилиндрическое колесо изображено на рисунке имеет модуль:
 а) 6,75 мм.
а) 6,75 мм.
б) 20 мм.
в) 1,5 мм.
г) 3,75 мм.
д) 3,00 мм.
33. Среди показанных подшипников могут воспринимать комбинированную (радиальную и соевую) нагрузку одновременно:
 а) все г) 2
а) все г) 2
б) 3 д) 1
в) 4
34. Из приведенных на рисунке муфт упругой втулочно-пальцевой является:
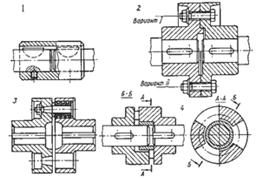
а) 1 б) 2 в) 3 г) 4
35. Из выражений для определения модуля зубчатой передачи справедливо:
а) m=πp
б) m=d/z
в) m=2π/z
г) m=πd/z
36. Для определения межосевого расстояния в прямозубой цилиндрической передаче справедлива формула:
а) а=(mzz)/2cosβ
б) а=m(z1+z2)/2
в) а=m(z1+q)/2
г) а=m(z1+z2)/2cosβ
37. По какой из формул нельзя определить передаточное число в червячной передаче:
а) U=d2/d1
б) U=ω2/ω1
в) U=n2/n1
г) U=z2/z1
д) все приведенные выражения несправедливы
38. Из приведенных муфт втулочной является:

а) 1 б) 2 в) 3 г) 4
39. Укажите соответствие формы шпонки ее названию:


а) призматическая
б) клиновая
в) сегментная
Содержание
1. Теоретическая механика 3
1.1.Статика 3
1.1.1. Понятия и определения. Аксиомы статики 3
1.1.2. Связи 7
1.1.3. Основные виды связей и их реакции 7
1.1.4. Плоская система сходящих сил 10
1.1.5. Проекции силы на координатную ось 11
1.1.6. Момент силы относительно точки (центра) 12
1.1.7. Условия равновесия произвольной плоской системы сил 12
1.1.8. Пара сил 13
1.1.9. Условие равновесия произвольной плоской системы сил 14
1.1.10. Система параллельных сил 17
1.1.11. Трение 19
1.1.12. Пример решения задачи на использование условий равновесия
плоской системы сходящихся сил. 22
1.1.13. Пример определения реакций опор двухопорной балки.
На использование условий равновесия плоской произвольной
системы сил. 24
1.2. Кинематика 26
1.2.1. Векторный способ задания движения 26
1.2.2. Естественный способ задания движения 30
1.2.3. Движение материальных тел 34
1.2.4. Теорема о проекциях скоростей двух точек тела 41
1.2.5. Мгновенный центр скоростей 42
1.2.6. Сложное движение точки. 44
1.2.7. Пример расчета траектории движения точки. 47
1.2.8. Пример расчета механизма на определение его скоростей и ускорений. 49
1.3. Динамика 52
1.3.1. Аксиомы динамики 52
1.3.2. Уравнения движения точки в декартовой системе координат 54
1.3.3. Одномерное движение 54
1.3.4. Уравнения материальной точки в естественной системе координат 55
1.3.5. Колебательное движение материальной точки 56
1.3.6. Кинетическая энергия механической системы 60
1.3.7. Работа 61
1.3.8. Принцип Д’Аламбера 64
1.3.9. Количество движения механической системы 66
1.3.10. Момент количества движения механической системы 67
1.3.11. Принцип возможных перемещений 68
2. Сопротивление материалов 70
2.1. Основные понятия 70
2.1.1. Основные допущения и гипотезы. 70
2.1.2. Модели прочности надежности. 72
2.1.3. Модели разрушения. 76
2.1.4. Основные виды деформации. 76
2.1.5. Внутренние силы. Метод сечений. 77
2.1.6. Виды сопротивлений. 80
2.1.7. Напряжения и деформации. 81
2.2. Растяжение и сжатие 83
2.2.1. Продольная деформация. 83
2.2.2. Поперечная деформация. 84
2.2.3. Закон Гука. 84
2.2.4. Диаграммы растяжения. 85
2.2.5. Основы прочностных расчетов элементов конструкций. 88
2.2.6. Пример расчета стержня на растяжение – сжатие. 89
2.3. Сдвиг. 92
2.3.1. Чистый сдвиг. Закон Гука при сдвиге. 92
2.3.2. Расчет на сдвиг (срез) 93
2.4. Кручение. 94
2.4.1. Общие сведения о деформации кручения. 94
2.4.2. Напряжение и деформация при кручении. 97
2.4.3. Расчет на жесткость и прочность при кручении. 98
2.4.4. Пример расчета вала при кручении. 98
2.5. Изгиб. 101
2.5.1. Общие сведения. 101
2.5.2. Понятие об изгибающем моменте и поперечной силе. 102
2.5.3. Правило знаков. 103
2.5.4. Эпюры поперечных сил и изгибающих моментов. 104
2.5.5. Осевые моменты инерции. 104
2.5.6. Линейные и угловые перемещения при изгибе 106
2.5.7. Пример расчета балки на изгиб. 108
2.6. Сложное сопротивление. 113
2.6.1. Косой изгиб. 113
2.6.2. Главные площадки и главные напряжения. 115
2.6.3. Тензор напряжений. 116
2.6.4. Изгиб с растяжением-сжатием. 117
2.6.5. Теории прочности. 118
2.6.6. Изгиб с кручением. 121
2.6.7. Пример расчета вала на изгиб с кручением. 122
2.7. Устойчивость сжатых стержней. 127
2.8. Усталостное разрушение. 129
3. Детали машин 131
3.1. Основные понятия 131
3.2. Критерии работоспособности деталей 132
3.3. Выбор допускаемых напряжений 133
3.4. Неразъемные соединения 134
3.4.1. Сварные соединения 134
3.4.2. Соединения с гарантированным натягом 137
3.4.3. Клеевые соединения 138
3.4.4. Соединения пайкой 139
3.4.5. Клепанные соединения 140
3.5. Разъемные соединения 140
3.5.1. Резьбовые соединения 141
3.5.2. Шпоночные соединения 143
3.5.3. Шлицевые соединения. 144
3.5.4. Клиновые, штифтовые и профильные соединения. 145
3.6. Основные конструкционные материалы. 146
3.6.1. Классификация конструкционных материалов 147
3.7. Термическая обработка. 149
7.1. Виды термических обработок. 149
3.8. Химико-термическая обработка. 150
3.9. Кинематические пары и цепи 150
3.10. Передачи вращательного движения 151
3.10.1. Кинематические и силовые параметры передач 152
3.10.2. Передаточное отношение и КПД механизма 152
3.10.3. Ременные и цепные передачи 153
3.10.4. Расчет и проектирование ременных передач 155
3.10.5. Силовые взаимодействия в ременной передаче 157
3.11. Цепные передачи 159
3.11.1. Классификация цепных передач 159
3.11.2. Расчет цепной передачи 160
3.12. Зубчатые передачи. 161
3.12.1. Классификация зубчатых передач 162
3.12.2. Геометрия эвольвентного зубчатого зацепления 162
3.12.3. Основные геометрические параметры зубчатой передачи 163
3.12.4. Элементы конструкции зубчатого колеса 165
3.12.5. Материалы зубчатого колеса 166
3.12.6. Силы, действующие в зацеплении прямозубой цилиндрической
передачи 166
3.12.7. Виды разрушения зубьев 167
3.12.8. Расчеты на прочность 167
3.13. Червячные передачи 168
3.13.1. Геометрические параметры червячной передачи 169
3.13.2. Силы, действующие в червячном зацеплении 170
3.13.3. Расчет на прочность 170
3.13.4. Материалы червяков и червячных колес 171
3.14. Оси, валы 171
3.14.1. Классификация валов 171
3.14.2. Материалы осей и валов 173
3.14.3. Расчет осей и валов 174
3.15. Подшипники 175
3.15.1. Подшипники скольжения 175
3.15.2. Расчет подшипников скольжения по среднему давлению 176
3.15.3. Режимы трения в подшипниках скольжения 176
3.15.4. Материалы подшипников скольжения 177
3.16. Подшипники качения 177
3.16.1. Классификация подшипников качения 177
3.16.2. Устройство подшипника качения 179
3.16.3. Виды разрушений подшипников качения 179
3.16.4. Подбор подшипников качения 180
3.17. Муфты 181
3.17.1. Выбор муфт 183
3.18. Лабораторные работы 183
3.18.1. Лабораторная работа 1. Элементы кинематических
цепей и их графическое изображение на схемах 184
3.18.2. Лабораторная работа 2. Геометрия зубчатых колес 188
3.18.3. Лабораторная работа 3. Изучение конструкции редукторов 196
3.19. Расчетно-графическая работа 204
3.19.1.Выбор двигателя. Кинематический и силовой расчет привода 204
3.19.2. Примеры расчета приводов машин 208
Список литературы 215
Приложения 217
Учебное издание
Поиск по сайту: