АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Вопрос. Цифровые фильтры с конечной импульсной характеристикой (КИХ)
|
Читайте также: |
Физически осуществимые цифровые фильтры работают в реальном масштабе времени, для формирования выходного сигнала в i-ый дискретный момент времени могут использовать следующие данные:
1. Значения выходного сигнала в текущей момент времени; так же некоторое количество прошлых отсчетов входного сигнала: x(i-1), x(i-2), x(i-m);
2. Некоторое количество предыдущих отсчетов выходного сигнала: y(i-1), y(i-2), y(i-n).
Целые числа m и n определяют порядок цифрового фильтра. Фильтры классифицируются в зависимости от того, как используется информация о прошлом состоянии системы.
Фильтры с КИХ или не рекурсивные фильтры, работающие в соответствии со следующим алгоритмом.
 , m – порядок фильтра.
, m – порядок фильтра.
Не рекурсивный фильтр производит взвешивание, суммирование предыдущих отсчётов входного сигнала. Прошлые отсчеты выходного сигнала не используются.

H(z) – системная функция.
Системная функция имеет m нулей и один полюс, при z=0.
Алгоритм функционирования цифрового фильтра с КИХ показан на рис.45.
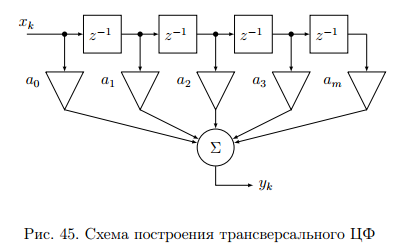
Основными элементами фильтра служат блоки задержки отсчетов значений на 1 интервал дискретизации  .
.
Масштабные блоки, выполняющие умножение на весовые коэффициенты в цифровой форме. С выхода масштабных блоков сигнал поступает в сумматор, где вычисляется выходной сигнал.
Данная структурная схема не является электрической, а служит графическим изображением алгоритма обработки сигнала на ЭВМ. Выходными и входными данными для такого алгоритма служат массивы чисел.
Применим к системным функциям обратное Z – преобразование и найдем импульсную характеристику:
 (импульсная характеристика фильтра).
(импульсная характеристика фильтра).
Импульсная характеристика КИХ фильтра содержит конечное число элементов и данный фильтр всегда устойчив.
Найдем частотную характеристику выполнив подстановку 

T=1/fs – интервал дискретизации.
Подбирая коэффициенты  в данном выражении можно получить АЧХ фильтра.
в данном выражении можно получить АЧХ фильтра.
Пример программной реализации ЦФ с КИХ – семинар №4.
Поиск по сайту: