АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Види безперервних регуляторів
Залежно від вибраного вигляду регулятор може мати пропорційну характеристику (П), пропорційно-інтегральну характеристику (ПІ), пропорційно-диференціальну характеристику (ПД) або пропорційно-інтегральну характеристику з дією по похідній (ПІД-регулятор).
- ПІ-регулятор, пропорційно-інтегральний регулятор
(див. мал. а).
ПІ-регулятор є поєднання П- та І-регуляторів.
Передавальна функція ПІ-регулятора:Wрп(P)=K1 + K0/P.
- ПД-регулятор, пропорційно-диференціальний регулятор (див. мал. б)
ПД-регулятор є поєднання П- та Д-регуляторів.
Передатня функція ПД-регулятора: WПД(P)=K1 + K2*P.
-ПІД-регулятор, пропорційний-інтегральний-диференціальний регулятор (див.мал.в)
ПІД-регуляторє поєднання П-, І- і Д-регуляторів.
Передавальна функція ПІД-регулятора: WПІД(P)=K1 + K0/P + K2*P.
Найчастіше використовується ПІД-регулятор, оскільки він поєднує в собі переваги всіх трьох типових регуляторів.
Реакція ПІД-регулятора на одиничну ступінчасту дію:
Завдяки додатковому підключенню Д-складової ПІД-регулятор досягає поліпшення динамічної якості регулювання.
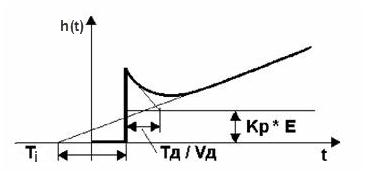
ПІД-регулятор. Реакція на одиничну ступінчасту дію.
Поиск по сайту: