АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Возможные и виртуальные перемещения
Перемещение материальной точки зависит от ее массы, приложенных к точке сил связей и начальных условий. Определение перемещения точки сводится к решению задачи динамики точки. В аналитической механике используются два основных понятия о возможном и виртуальном перемещении точки.
Пусть на материальную точку наложена голономная нестационарная удерживающая связь, уравнение которой
 (2.4)
(2.4)
Возможным перемещением несвободной материальной точки называется такое бесконечно малое перемещение, отвечающее бесконечно малому промежутку времени dt, которое допускается наложенными на систему ограничениями – связями, обозначается d  (dx,dy,dz) (см. рис.2.5).
(dx,dy,dz) (см. рис.2.5).
Этому уравнению удовлетворяют координаты точки М в момент времени t. Через бесконечно малый промежуток времени dt координаты  точки также должны удовлетворять уравнению связи т.е.
точки также должны удовлетворять уравнению связи т.е.
 (2.5)
(2.5)
Раскладывая функцию (2.5) в ряд Тейлора с точностью до слагаемых выше первого порядка малости и учитывая, что связь имеет вид
(2.3), получаем
 (2.6)
(2.6)
Выражение (2.6) представляет собой условие, которому должны удовлетворять проекции вектора d элементарного возможного перемещения точки.
Виртуальным перемещением несвободной материальной точки, отвечающем данному моменту времени t, называется такие воображаемое, бесконечно малое, прямолинейное, отвечающее данному моменту времени перемещение точки, которое могло бы иметь место, если бы с этого момента времени связи, наложенные на ее движение, сделались бы неизменяемыми.
Виртуальные перемещения точки обозначаются вариациями:
вектор  называют вариацией радиус-вектора точки, а проекции на оси декартовой системы координат ¾ вариациями координат. Ихобозначают ¾dx, dy, dz.
называют вариацией радиус-вектора точки, а проекции на оси декартовой системы координат ¾ вариациями координат. Ихобозначают ¾dx, dy, dz.
Виртуальные перемещения не связаны ни с движением точки, ни с изменением наложенных связей. Они представляют собой воображаемые перемещения, которые можно представить совокупностью бесконечно малых векторов , зависящих только от структуры связей, зафиксированных в данный момент времени. Виртуальные перемещения точки должны удовлетворять дифференциальным соотношениям, вытекающим из уравнений связей при условии, что время является фиксированным. Получим эти соотношения и установим различие между бесконечно малым возможным d и виртуальным перемещениями точки.
Пример 2.5. 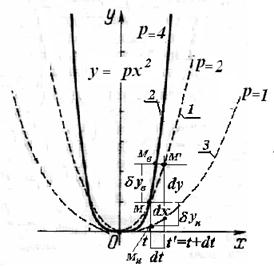 Представим теперь (рис.2.5), что перемещение точки из положения, занимаемого ею в данный момент времени, в бесконечно близкое положение, происходит в результате изменения координат точки при фиксированном времени t (т.е. либо вертикально вверх (р =4), либо вертикально вниз (р =1): как бы изменение функции (параболы y = p x2, p=2 ) происходит не за счет изменения аргумента, а за счет изменения параРис.2.5 метра р). Координаты точки с учетом их вариации должны удовлетворять уравнению связи
Представим теперь (рис.2.5), что перемещение точки из положения, занимаемого ею в данный момент времени, в бесконечно близкое положение, происходит в результате изменения координат точки при фиксированном времени t (т.е. либо вертикально вверх (р =4), либо вертикально вниз (р =1): как бы изменение функции (параболы y = p x2, p=2 ) происходит не за счет изменения аргумента, а за счет изменения параРис.2.5 метра р). Координаты точки с учетом их вариации должны удовлетворять уравнению связи
 (2.7)
(2.7)
Раскладывая эту функцию в ряд Тейлора с точностью до слагаемых выше первого порядка малости и учитывая, что связь имеет вид (2.4), получаем
 (2.8)
(2.8)
Таким образом, при наличии связи вида (2.4) вариации координат точки должны удовлетворять условию (2.8). При выводе условия
(2.8) время полагалось фиксированным, поэтому данное условие должно выполняться как при стационарных, так и при нестационарных связях, наложенных на точку.
Используя понятие вектор-градиент, выражение (2.8) можно рассматривать как скалярное произведение векторов ( ) = 0,:
) = 0,:

 (2.9)
(2.9)
и  (2.10)
(2.10)
Вектор – градиент расположен вдоль главной нормали к поверхности Поэтому условие (2.8) означает что вектор ортогонален главной нормали и, следовательно, расположен по касательной.
Поэтому при исследовании несвободного движения точки, системы точек или системы тел удобно пользоваться образом касательного пространства. В качестве примера рассмотрим движение материальной точки по гладкой плоской кривой, пусть это будет уравнение параболы y = p x2, (рис.2.5), где p =2. Положение материальной точки М определяется заданием ее координат (x,y). Однако y = ƒ(x), и, следовательно, положение М полностью задается только величиной x. Пусть за промежуток времени dt точка М переместится и займет положение М (1),с координатами (x+dx), (y+dy).
Так как по определению, виртуальным перемещением несвободной точки, отвечающей фиксированному моменту времени t, называется такое воображаемое, бесконечно малое, прямолинейное, отвечающее данному моменту времени перемещение точки, которое могло бы иметь место, если бы с этого момента времени связи, наложенные на ее движение, сделались бы неизменяемыми, то в данном случае точка М может переместиться только вертикально либо вверх в положение МВ, либо вниз – в положение МН, это значит, что изменение функции в данный момент времени t произошло не за счет аргумента x, а за счет параметра «p», пусть p =4 или p =1. Это и будет виртуальное перемещение dy, где p =2.
В дальнейшем условимся применять краткое выражение: «даем системе виртуальное перемещение»- это будет наше рабочее выражение.
С точки зрения математики виртуальные перемещения – это изохронные вариации координат точек, подчиненных уравнениям связи.
Так как слово «перемещение» ассоциируется с «передвижением», то, может быть для понимания существа метода вместо термина «виртуальные перемещения» употреблять термин «изохронные вариации» ведь когда мы даем виртуальное перемещение, никакого передвижения не происходит.
Поэтому криволинейные перемещения точек заменяют прямолинейными отрезками, отложенными по касательным к траекториям точек.
Установим связь между элементарными возможными и виртуальным перемещениями точек.
Если наложенная на точку связь стационарная, то  и условие (2.6) аналогично условию (2.8). Следовательно, если связь стационарная, то элементарное возможное перемещение точки совпадает с одним из виртуальных.
и условие (2.6) аналогично условию (2.8). Следовательно, если связь стационарная, то элементарное возможное перемещение точки совпадает с одним из виртуальных.
При нестационарной связи проекции вектора d удовлетворяют условию, не совпадающему с условием для проекций вектора .
В этом случае элементарное возможное перемещение точки не принадлежит к числу виртуальных.
Вариации определяются как и дифференциалы.
Пример 2.6. Математический маятник (рис.2.3): точка 0 – цилиндрический шарнир, 0М= l – невесомый нерастяжимый стержень. Уравнения связей:
1) z = 0, 2) x2 + y2 – l 2 = 0.
Связи - удерживающие (двухсторонние), голономные, стационарные.
Координаты точки М: x = l cos (j), y = l sin (j).
dx = - l sin (j) dj, dy = l cos (j) dj.
Виртуальное перемещение d r направлено по касательной к окружности.
Пример 2.7. Если 0М = l (t), (рис.2.4) то уравнения связей будут иметь вид: 1) z = 0, 2) x2 + y2 – l (t) 2 £ 0.
Связи - неудерживающие (односторонние), голономные, нестационарные. Координаты точки М: x = l (t) cos (j), y = l (t) sin (j).
dx = - l (t)sin (j) dj, dy = l (t) cos (j) dj, т.е. согласно определению виртуальных перемещений мы забываем, что l (t) –переменная от времени и полагаем, что l (t) соответствует фиксированному моменту времени.
2.4 Обобщенные координаты.
Поиск по сайту: