АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
ПРИМЕР ВЫБОРА И РАСЧЕТА ДВИГАТЕЛЯ
Пример 1.1. Выбрать и рассчитать двигатель на основе исходных данных:
– момент инерции нагрузки:  = 50 кг×м2;
= 50 кг×м2;
– момент сопротивления нагрузки:  = 180 Н×м;
= 180 Н×м;
– максимальная угловая скорость нагрузки: Wmax = 50 град/с;
– максимальное угловое ускорение нагрузки: emax = 10 град/с2.
Решение: 1. Рассчитываем требуемую мощность по формуле (1.13):
 =
=  .
.
2. Выбираем по табл. 1.1 двигатель, номинальная мощность которого
 .
.
Из таблицы технических данных двигателей серии МИ (см. табл. 1.1) следует, что двигатели МИ-22, МИ-31 и МИ-32 подходят по значению мощности на валу  = 0,37 кВт. При этом МИ-32 имеет частоту вращения
= 0,37 кВт. При этом МИ-32 имеет частоту вращения  = 1000
= 1000  и большой момент инерции
и большой момент инерции  = 135∙10–4. кг∙м2, т.е. не подходит с точки зрения обеспечения конструктивных требований. Двигатель МИ-31 имеет большую частоту вращения
= 135∙10–4. кг∙м2, т.е. не подходит с точки зрения обеспечения конструктивных требований. Двигатель МИ-31 имеет большую частоту вращения
= 2000 , а также относительно большой момент инерции
= 91,8∙10–4 кг∙м2. Двигатель МИ-22, по сравнению с МИ-32 и МИ-31, имеет частоту вращения = 3000 , но момент инерции более чем в два раза меньше момента инерции двигателя МИ-31. Поэтому, с целью обеспечения конструктивных требований, выбираем быстроходный двигатель МИ-22 с напряжением питания  = 60 В. Технические данные двигателя сведены в табл. 1.2.
= 60 В. Технические данные двигателя сведены в табл. 1.2.
Таблица 1.2
Технические данные двигателя
| Тип двигателя | МИ-22 |
Мощность на валу  , кВт , кВт
| 0,37 |
| Частота вращения ,
| |
| Напряжение питания , В
| |
Ток якоря  , А , А
| 8,2 |
Сопротивление обмотки якоря  , Ом , Ом
| 0,192 |
Момент номинальный  , , 
| 1,2 |
| Момент инерции ∙10–4, кг∙м2
| 40,8 |
3. Рассчитываем оптимальное передаточное число редуктора согласно (1.12):


4. Проверяем выбранный двигатель на соответствие требований
по скорости:
1) определим номинальную угловую скорость:
 рад/с
рад/с
и, приведенную к валу двигателя, угловую скорость поворота нагрузки:
 рад/с.
рад/с.
Так как 314 рад/с < 473,68 рад/с, то требования по скорости
не выполняются.
2) рассчитаем новое передаточное число редуктора по формуле:

 .
.
5. Рассчитываем значение требуемого вращающего момента
в соответствии с выражением (1.9) (i = i 1):

 Н×м
Н×м
6. Проверяем выбранный двигатель на соответствие требований
по моменту:
 ,
,  Н∙м.
Н∙м.
Расчеты показали, что требования по моменту выполняются.
7. Рассчитываем параметры динамической модели двигателя:
1) определяем коэффициент противо-ЭДС по формуле (1.2):
 В∙с/рад;
В∙с/рад;
2) определяем коэффициент момента по формуле (1.4):
 Н∙м/А;
Н∙м/А;
3) определяем электромеханическую постоянную времени двигателя:
 с;
с;
4) определяем электромагнитную постоянную времени двигателя. Индуктивность якорной цепи:
 Гн,
Гн,
тогда
 с;
с;
5) построение ССДМ ЭП в системе Simulink осуществляется следующим образом: звено с передаточной функцией  находится
находится
в библиотеке блоков Continuous (элементы непрерывных систем) (рис. 1.5) и обозначается Transfer Fcn (рис. 1.7). В поле диалогового окна блока вводятся данные числителя Numerator:  и знаменателя Denominator:
и знаменателя Denominator:  (рис. 1.8). Аналогично формируется звено
(рис. 1.8). Аналогично формируется звено  Numerator
Numerator  , Denominator
, Denominator  .
.

| 
|
| Рис. 1.7. Блок Transfer Fcn | Рис. 1.8. Диалоговое окно блока Transfer Fcn |

| 
|
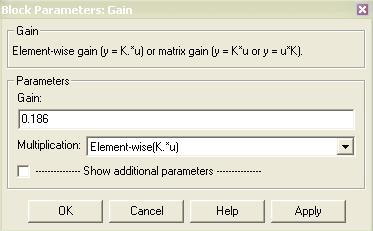
| Рис. 1.9. Блок Gain | Рис. 1.10. Диалоговое окно блока Gain |
Звенья 1 /  и
и  находятся в библиотеке блоков Math Operations и обозначаются Gain (рис. 1.9). В поле диалогового окна блока вводятся соответствующие значения коэффициентов (рис. 1.10), для .
находятся в библиотеке блоков Math Operations и обозначаются Gain (рис. 1.9). В поле диалогового окна блока вводятся соответствующие значения коэффициентов (рис. 1.10), для .
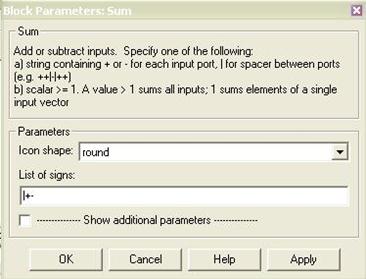
Сумматоры также находятся в библиотеке блоков Math Operations и обозначаются Sum (рис. 1.11). Для реализации отрицательной связи необходимо в диалоговом окне блока записать: «+ –» (рис. 1.12).

| 
|
| Рис. 1.11. Блок Sum | Рис. 1.12. Диалоговое окно блока Sum |

| 
|
| Рис. 1.13. Блок Step | Рис. 1.14. Диалоговое окно блока Step |
Сигнал  = формируется с помощью блока Step (рис. 1.13), находящегося в библиотеке блоков Sources. В диалоговом окне блоков вводится соответствующее значение (рис. 1.14). Аналогично формируется сигнал М с.
= формируется с помощью блока Step (рис. 1.13), находящегося в библиотеке блоков Sources. В диалоговом окне блоков вводится соответствующее значение (рис. 1.14). Аналогично формируется сигнал М с.
Выходная координата регистрируется блоком Scope (рис. 1.15), расположенным в библиотеке блоков Sinks.
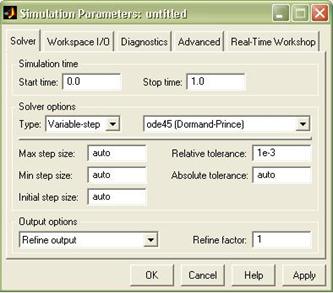
По умолчанию в системе Simulink конечное время моделирования устанавливается равным 10,0. После выбора команды Simulation Parameters меню Simulation окна модели выводится в диалоговое окно Simulation Parameters, где на вкладке Solver в текстовом поле Stop time вводится установленное для задачи значение (рис. 1.16). Затем нажимается кнопка ОК.

| 
|
| Рис. 1.15. Блок Scope | Рис. 1.16. Диалоговое окно Simulation Parameters |
Окно блока Scope выводится при двойном нажатии кнопки мыши
на изображении блока. Выбор команды Start меню Simulation производит запуск процесса моделирования, при этом, в окне блока Scope строится график, отображающий значения выходной координаты в функции времени моделирования. Для автоматической установки границ на осях выбирается пиктограмма Autoscale (в виде бинокля) на панели инструментов данного окна.
Полученная ССДМ двигателя представлена на рис. 1.17.
Для сохранения созданной модели выбирается команда Save меню File или пиктограмма Save (в виде дискеты) на панели инструментов и
в диалоговом окне Save As вводится имя файла.

Рис. 1.17. ССДМ двигателя постоянного тока
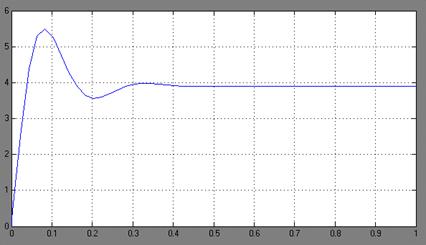
На рис. 1.18 и рис. 1.19 представлены результаты моделирования
 , рад/с.
, рад/с.
 t, c
t, c
Рис. 1.18. Переходная характеристика двигателя по управляющему
воздействию
 , рад/с
, рад/с
 t, c
t, c
Рис. 1.19. Переходная характеристика двигателя по моменту сопротивления
Установившиеся значения скорости вращения двигателя при наличии управляющего воздействия и момента сопротивления составляют, соответственно:
 рад/с и
рад/с и  рад/с.
рад/с.
Определим относительную погрешность по формуле:
 .
.
Наличие моментной составляющей погрешности  говорит
говорит
о том, что механическая характеристика двигателя не является абсолютно жесткой. Для устранения моментной составляющей погрешности
в контуре скорости рассчитывается регулятор скорости, обеспечивающий настройку на оптимум по модулю, и искусственная механическая характеристика контура скорости становится абсолютно жесткой.
Поиск по сайту: