АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Расчет параметров регулятора скорости и построение структурной схемы динамической модели контура скорости
В соответствии со схемой (рис. 2.9), определяем передаточную функцию разомкнутого КС:
 . (2.21)
. (2.21)
Передаточная функция КС, настроенного на ОМ, имеет вид:
 , (2.22)
, (2.22)
где  – суммарная постоянная времени КС.
– суммарная постоянная времени КС.
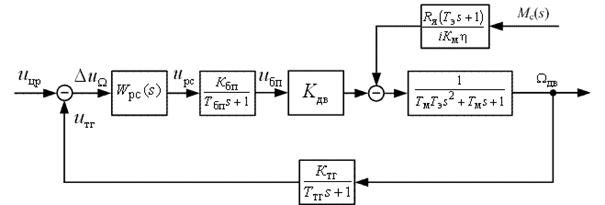
Рис. 2.9. Структурная схема динамической модели контура скорости
Приравнивая правые части выражений (2.21) и (2.22), получим уравнение:
 ,
,
из которого находим передаточную функцию РС:
 . (2.23)
. (2.23)
Выражение (2.23) представляет собой передаточную функцию, свойства которой соответствуют динамическим свойствам ПИД-регулятора.
Для реализации данной структуры необходимо в передаточную функцию (2.23) добавить инерционное звено с малой постоянной времени  . Тогда передаточная функция РС запишется как
. Тогда передаточная функция РС запишется как
 .
.
Поскольку, постоянная времени Т рс1 < Т рс2, то малую постоянную времени – РС Т рс3 принимаем из соображений, что
 (N = 10).
(N = 10).
Постоянную времени Т рс3 следует отнести к суммарной малой постоянной времени КС и считать по формуле:
 . (2.24)
. (2.24)
Для подтверждения правильности проведенных расчетов необходимо получить график ЛЧХ, график переходной функции КС
по задающему воздействию  и график переходной функции КС
и график переходной функции КС
по моменту сопротивления нагрузки  . По результатам моделирования проводится анализ и сравнительная оценка полученных показателей качества.
. По результатам моделирования проводится анализ и сравнительная оценка полученных показателей качества.
Поиск по сайту: