АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
ВЫБОР ДВИГАТЕЛЯ И КИНЕМАТИЧЕСКИЙ РАСЧЕТ
Рекомендации по выбору электродвигателя
В проектируемом изделии может требоваться постоянное или переменное значение частоты вращения вала двигателя. В первом случае применяют синхронные и асинхронные двигатели переменного тока или двигатели постоянного тока с регуляторами скорости. Для регулируемых приводов обычно выбирают двигатели постоянного тока, шаговые двигатели, двигатели переменного тока с частотным управлением.
Для проектируемых в рамках данного курсового проекта приводов общего назначения рекомендуются асинхронные короткозамкнутые двигатели серии 4А. Эти двигатели наиболее универсальны, причем могут при необходимости обеспечивать реверсивность.
|

|
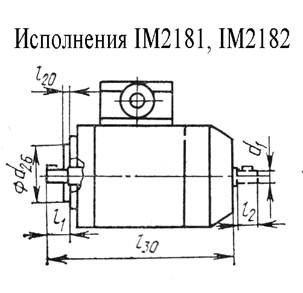
Рисунок 2.1 - Конструкции двигателей
Асинхронные двигатели переменного тока имеют угловую скорость установившегося движения, отличающуюся от номинальной на (5…20) %.
Таблица 2.1
Размеры двигателей асинхронных серий 4А
| Габариты | l1 | l10 | l20 | l30 | d30 | h10 | b10 | b31 | h37 | d1 | d10 | d20 | d22 | d26 |
| 9h6 | 5,8 | М5 | 40h6 | |||||||||||
| 11h6 | 5,8 | М5 | 50h6 | |||||||||||
| 3,5 | 14h6 | 7,8 | М5 | 60h6 |
Для определения требуемой мощности электродвигателя (Таблицы 2.2, 2.3) следует использовать значения приведенных моментов сил сопротивления на выходном валу редуктора Tc и номинальной угловой скорости этого вала ωс; или же тяговой силы стола F и скорости перемещения стола прибора V.
Таблица 2.2
Технические характеристики двигателей асинхронных трехфазных серии 4ААМ
| Обозначение | Р, Вт | n, об/мин | I, А | cosφ | η, % | 
| 
| 
| 
| Fr, Н | Fa, H |
| Двухполюсные, синхронная частота вращения 3000 об/мин | |||||||||||
| 50А2 | 0,32 | 0,70 | 2,0 | 1,8 | 2,2 | ||||||
| 50В2 | 0,32 | 0,70 | 2,0 | 1,8 | 2,2 | ||||||
| 56А2 | 0,54 | 0,76 | 2,0 | 1,5 | 2,2 | ||||||
| 56В2 | 0,74 | 0,77 | 2,0 | 1,5 | 2,2 | ||||||
| 63А2 | 0,93 | 0,86 | 2,0 | 1,2 | 2,2 | ||||||
| 63В2 | 1,33 | 0,86 | 2,0 | 1,2 | 2,2 | ||||||
| Четырёхполюсные, синхронная частота вращения 1500 об/мин | |||||||||||
| 50А4 | 0,31 | 0,60 | 2,0 | 1,7 | 2,2 | ||||||
| 50В4 | 0,42 | 0,60 | 2,0 | 1,7 | 2,2 | ||||||
| 56А4 | 0,44 | 0,66 | 2,1 | 1,5 | 2,2 | ||||||
| 56В4 | 0,64 | 0,64 | 2,1 | 1,5 | 2,2 | ||||||
| 63А4 | 0,65 | 0,65 | 2,0 | 1,2 | 2,2 | ||||||
| 63В4 | 0,69 | 0,69 | 2,0 | 1,2 | 2,2 | ||||||
| Примечания – Fr, Fa – предельные радиальная и осевая (при предельной радиальной) нагрузках на конец вала, Io – момент инерции ротора |
Таблица 2.3
Технические характеристики двигателей асинхронных трехфазных серии 4ААМ
| Обозначение | Р, Вт | n, об/мин | 
| cosφ | η, % |
|
|
|
| Двухполюсные, синхронная частота вращения 3000 об/мин | ||||||||
| Е50А2, У50А2 | 6,5 (3,0) | 0,60 | 1,0 (0,9) | 1,9 | 0,8 (1,7) | |||
| Т50В2, УТ50А2 | 3,5 (4,0) | 0,80 | 0,4 (2,0) | 2,0 | 0,4 (2,0) | |||
| Е50В2, У50В2 | 6,5 (3,0) | 0,59 | 1,0 (1,9) | 1,9 | 0,9 (1,7) | |||
| Т50В2, УТ50В2 | 3,5 (4,0) | 0,93 | 0,5 (2,0) | 2,0 | 0,5 (2,0) | |||
| Е56А2, У56А2 | 8,5 (4,5) | 0,82 | 0,8 (1,7) | 1,6 | 0,8 (1,0) | |||
| Т56А2, УТ556А2 | 4,0 (5,0) | 0,96 | 0,4 (1,5) | 1,8 | 0,4 (1,0) | |||
| Е56В2, У56В2 | 8,5 (5,5) | 0,76 | 0,8 (1,6) | 1,6 | 0,8 (1,0) | |||
| Т56В2, УТ56В2 | 4,0 (5,0) | 0,96 | 0,4 (1,5) | 1,8 | 0,4 (1,0) | |||
| Е63А2, У53А2 | 8,5 (5,5) | 0,76 | 0,8 (1,6) | 1,7 | 0,8 (1,0) | |||
| Т63А2, УТ63А2 | 4,0 (5,0) | 0,96 | 0,4 (1,6) | 1,7 | 0,4 (1,0) | |||
| Е63В2, У63В2 | 8,5 (5,5) | 0,75 | 0,8 (1,9) | 1,7 | 0,8 (1,0) | |||
| Т63В2, УТ63А2 | 4,0 (5,0) | 0,95 | 0,4 (1,5) | 1,7 | 0,4 (1,0) | |||
| Четырёхполюсные, синхронная частота вращения 1500 об/мин | ||||||||
| Е50А4, У50А4 | 4,5 (2,5) | 0,51 | 1,0 (2,2) | 1,9 | 0,8 (2,0) | |||
| Т50В4, УТ50А4 | 2,5 (3,0) | 0,67 | 0,4 (1,9) | 2,0 | 0,4 (1,7) | |||
| Е50В4, У50В4 | 4,5 (2,5) | 0,54 | 1,0 (1,9) | 1,9 | 0,8 (1,7) | |||
| Т50В4, УТ50В4 | 2,0 (4,0) | 0,85 | 0,6 (1,9) | 2,0 | 0,6 (1,7) | |||
| Е56А4, У56А4 | 2,5 (4,5) | 0,65 | 1,0 (1,6) | 1,5 | 0,8 (1,0) | |||
| Т56А4, УТ556А4 | 4,0 (5,0) | 0,88 | 0,4 (1,6) | 1,6 | 0,4 (1,0) | |||
| Е56В4, У56В4 | 7,5 (4,0) | 0,65 | 1,0 (1,7) | 1,5 | 0,8 (1,0) | |||
| Т56В4, УТ56В4 | 4,0 (4,5) | 0,88 | 0,4 (1,8) | 1,6 | 0,4 (1,0) | |||
| Е63А4, У53А4 | 7,5 (4,0) | 0,65 | 1,0 (2,0) | 1,5 | 0,8 (1,0) | |||
| Т63А4, УТ63А4 | 4,0 (4,5) | 0,90 | 0,4 (1,8) | 1,6 | 0,4 (1,0) | |||
| Е63В4, У63В4 | 6,5 (4,0) | 0,65 | 1,0 (2,0) | 1,5 | 0,8 (1,0) | |||
| Т63В4, УТ63А4 | 4,0 (4,5) | 0,91 | 0,4 (1,8) | 1,6 | 0,4 (1,0) | |||
| Примечания: 1.В скобках даны значения кратности моментов и токов для двигателей с пусковым конденсатором (исполнения У и УТ) 2.Моменты инерции ротора и предельные нагрузки на конец вала смотрите для соответствующего габарита по таблице 2.2 |
Следует иметь в виду, что на потребляемую мощность влияют не только полезная нагрузка, но и потери в механизме, его динамические характеристики, строгие значения которых можно определить только в процессе конструирования.
Требуемую мощность P электродвигателя при вращательном движении рабочего элемента определяют из зависимости:
 ; (2.1)
; (2.1)
где P – мощность электродвигателя, Вт;
Tc – момент сил сопротивления на выходном валу редуктора, Н∙м;
ωс – номинальная угловая скорость выходного вала, рад/с;
Kдин – коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент разгона. Если в задании не оговорено время переходного процесса, обычно принимают Kдин = 1,05…1,10.
η – коэффициент полезного действия привода, равный произведению частных КПД передач, входящих в кинематическую схему.
Требуемую мощность P электродвигателя при поступательном движении рабочего элемента определяют из зависимости:
 , (2.2)
, (2.2)
Где F – тяговая сила стола, Н;
V – скорость перемещения стола прибора, м/с;
Значения КПД на этой стадии проектирования задают исходя из предполагаемого вида передач от двигателя к рабочему звену. Мощность электродвигателя для проектируемого привода должна быть не ниже той, которая определена по формулам (2.1), (2.2). Каждому значению номинальной мощности Pном соответствует обычно не один, а несколько типов асинхронных двигателей с различными частотами вращения, близкими к номинальным значениям 3000, 1500, 1000, 750 об/мин.
При выборе двигателя надо учитывать, что тихоходные электродвигатели с синхронной частотой вращения 750 об/мин и менее применяют в технически обоснованных случаях, т.к. они дороже быстроходных и имеют большие габариты.
После проектирования редуктора необходимо определить действительные значения КПД и произвести проверочный расчет двигателя. Момент на валу выбранного двигателя должен быть не менее приведенного расчетного момента.
Поиск по сайту: