АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Определение элементов внешнего ориентирования модели по опорным точкам
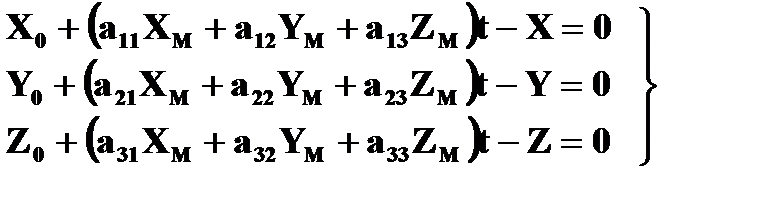
Для определения элементов внешнего ориентирования модели по опорным точкам в качестве исходных используют уравнения (2.8.5), которые представим в виде:
 (2.9.1)
(2.9.1)
Каждая планово-высотная опорная точка (X,Y,Z) позволяет составить 3 уравнения (2.9.1), в которых неизвестными являются 7 элементов внешнего ориентирования модели. Каждая плановая опорная точка (X,Y) позволяет составить два первых уравнения из выражения (2.9.1), а каждая высотная опорная точка (Z) – третье уравнение из выражения (2.9.1).
Для определения элементов внешнего ориентирования модели необходимо составить систему не менее чем из 7 уравнений. Очевидно, что для этого необходимо иметь не менее двух планово-высотных и одной высотной опорной точки. Задачу можно также решить, если иметь две плановые и три высотные опорные точки.
В случае, если в полете с помощью спутниковых навигационных систем были определены координаты центров проекций снимков, то они могут быть использованы в качестве опорных точек.
Так как уравнения (2.9.1) не линейны, их приводят к линейному виду и переходят к уравнениям поправок.
 (2.9.2)
(2.9.2)
В уравнении поправок:
ai, bi, ci – частные производные от уравнений (2.9.1) по соответствующим переменным;
ℓX, ℓY, ℓZ – свободные члены.
Значения коэффициентов уравнений поправок ai, bi, ci вычисляют по известным значениям координат ХМ, YM, ZM и X, Y, Z и приближенным значениям неизвестных. Значения свободных членов ℓX, ℓY, ℓZ вычисляют таким же образом по формулам (2.9.1).
Полученную таким образом систему уравнений поправок решают методом последовательных приближений. Если количество уравнений поправок в системе больше семи, ее решают по методу наименьших квадратов (под условием VTPV=min).
Поиск по сайту: