АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Система збіжних сил. Умови рівноваги системи
збіжних сил (рис. 1.20)
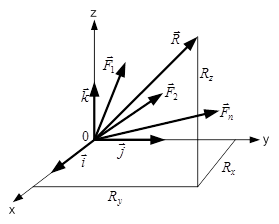
Рис. 1.20
Користуючись аксіомою про паралелограм сил, рівнодійна  системи збіжних сил
системи збіжних сил  визначається графічно як замикальна сторона многокутника сил:
визначається графічно як замикальна сторона многокутника сил:

Аналітично рівнодійну силу можна визначити за її проекціями на осі прямокутної системи координат (рис. 1.20) за теоремою про проекції векторної суми на осі координат.
 ,
,  ,
,  ,
,
де  ‑ проекції відповідних сил на осі координат.
‑ проекції відповідних сил на осі координат.
Подамо рівнодійну у вигляді розкладання по ортах:
Тоді її модуль  ,
,
або  .
.
Напрямні косинуси рівнодійної сили:
 ;
;  ;
;  .
.
Теорема. Для рівноваги просторової системи збіжних сил необхідно і достатньо, щоб рівнодійна сила дорівнювала нулю  . Ця умова є геометричною умовою рівноваги збіжної системи сил.
. Ця умова є геометричною умовою рівноваги збіжної системи сил.
Оскільки  , то многокутник сил має бути замкненим, тобто кінець останньої сили
, то многокутник сил має бути замкненим, тобто кінець останньої сили  збігається з початком першої сили.
збігається з початком першої сили.
Умови рівноваги системи збіжних сил в аналітичній формі формулюються так: для рівноваги просторової системи збіжних сил необхідно і достатньо, щоб алгебраїчні суми проекцій сил на три взаємно перпендикулярні осі дорівнювали нулю:
 ;
;  ;
; 
Поиск по сайту: