АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Общие определения
Общий случай движения судна описывается системой из трех диф-ференциальных уравнений движения: двух уравнений сил — по продольной X и поперечной Y осям и уравнения моментов вокруг вертикальной оси Z.
Эта система в несколько упрощенном варианте имеет вид:

 (7.1)
(7.1)
Первое уравнение системы характеризует движение судна по оси «X» при разгоне и торможении, поэтому его решение позволяют оценивать инерционно-тормозные характеристики судна. Второе уравнение описывает закономерности поперечного смещения судна. Третье уравнение, характеризующее угловое движение, используется при оценки управляемости судов. Из данной системы видно, что при равномерном и прямолинейном движении судна, левые части уравнений будут равны нулю, а поперечного движения не будет. Исходя из этого система уравнений примет вид:
Pe = RX + AX + PPX
 G
G






 VX
VX
PPX Pe AX RX
Рис. 7.1. Силы, действующие на судно при прямолинейном движении.
Маневренными элементами судна называют свойства, характеризующие его способность развивать, поддерживать и изменять режим движения. Основными маневренными элементами судна являются ходкость, инерция, поворотливость и управляемость.
Ходкость — способность судна развивать заданную скорость поступательного движения при эффективном использовании движителями мощности главных механизмов.
Ходкость характеризуется скоростью судна при равномерном прямо-линейном движении. Она зависит от числа оборотов движителей, мощности главных механизмов, расхода горючего, водоизмещения, состояния корпуса, рулей и выступающих частей, а также гидрометеорологических условий плавания.
Инерция — способность судна сохранять движение, соответствующее первоначальному режиму работы двигательно-движительного комплекса после изменения этого режима. Основными данными, характеризующими инерцию, являются время и расстояние, необходимые судну для остановки или приобретения другой заданной скорости при изменении режима работы машин.
Управляемость – способность судна совершать движение по заданной траектории. Управляемость объединяет два свойства судна – устойчивость на курсе и поворотливость.
Устойчивость на курсе – способность судна сохранять прямолинейное направление движения.
Поворотливость — способность судна изменять направление движения под воздействием руля или машин или руля и машин одновременно. Поворотливость определяется углом перекладки руля в градусах; площадью, формой, расположением и количеством рулей; площадью подводной части продольного сечения судна; характером обводов судна, особенностями его оконечностей и отношением длины судна к ширине.
Устойчивости на курсе в известной мере противоречит поворотливость судна: при увеличении устойчивости на курсе затрудняется изменение направления движения судна, т. е. ухудшается его поворотливость. Но с другой стороны, чрезмерная поворотливость судна затрудняет его движение в постоянном направлении; в этом случае удержание судна на курсе связано с напряженной работой рулевого и частой перекладкой, руля.
Морские суда должны обладать управляемостью, при которой устойчивость на курсе не затрудняет поворотливости судна, а поворотливость не мешает судну под действием руля следовать в избранном направлении, т. е. иметь достаточную устойчивость на курсе.
Устойчивость судна на курсе и его поворотливость зависят от взаимного расположения двух точек: приложения силы сопротивления воды и центра тяжести судна. На судне, следующем прямым курсом, эти две точки расположены в диаметральной плоскости, причем точка приложения силы R сопротивления воды может быть расположена или впереди или позади центра тяжести судна.
При работе машины на передний ход в центре тяжести судна приложена полезная сила упора винтов Ре, направленная в нос, и во второй точке приложена сила R сопротивления воды, направленная в корму. При следовании судна прямым курсом эти силы независимо от их взаимного расположения уравновешиваются и на уклонение с курса не влияют.
Предположим, что под действием внешней силы, чаще всего ветра или волны, судно незначительно уклонилось от курса. В первоначальный момент к центру тяжести судна будет приложена сила инерции Q, направленная по заданному курсу, и сила сопротивления воды R, действующая в противоположном направлении.
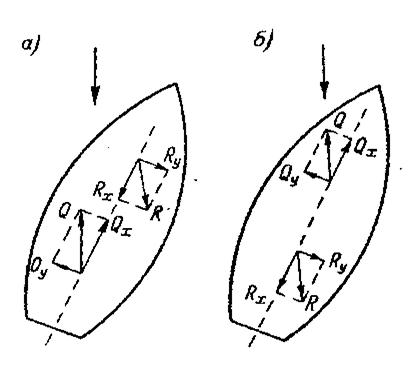
Рис.7.2. Действия силы инерции и силы сопротивления воды при уходе судна с курса.
Разложим эти силы на составляющие, направленные вдоль диаметральной плоскости судна и перпендикулярно к ней. Составляющие Qx и Rx, лежащие в диаметральной плоскости, на уклонение судна с курса влияния не окажут (рис. 7.2,а). Составляющие Qv и Ry, действующие перпендикулярно диаметральной плоскости, образуют пару, влияющую на уклонение судна с курса. Плечом этой пары будет расстояние между центром тяжести судна и точкой приложения сопротивления воды В зависимости от взаимного расположения указанных точек пара сил Qy и Ry может или препятствовать или способствовать дальнейшему уклонению судна с курса. Так, в случае расположения точки приложения силы сопротивления воды впереди центра тяжести пара сил будет увеличивать уклонение с курса; в другом случае (рис. 7.2,б), когда точка приложения силы сопротивления воды находится позади центра тяжести судна, составляющие Qy и Ry образуют пару, способствующую возвращению судна на курс; при таком расположении рассматриваемых точек устойчивость на курсе будет сохранена, но путем снижения поворотливости судна. Опытными данными установлено, что лучшая управляемость достигается тогда, когда точка приложения силы сопротивления воды совпадает с центром тяжести судна или находится несколько позади него. В этом случае перекладкой руля достигается как удержание судна на курсе, так и выполнение различных поворотов при маневрировании. Как показывают теоретические исследования и опытные данные, современные морские суда не обладают в полной мере устойчивостью на курсе. Даже при отсутствии ветра и волнения судно периодически отклоняется от курса, и его возвращают к заданному направлению действием руля.
Обычно считают судно устойчивым на курсе, если при ветре и волнении не свыше 3 баллов перекладку руля приходится делать не более 4—6 раз в минуту, причем требуется выводить руль из диаметральной плоскости не более чем на 2—3° на каждый борт. Таким образом, частота и угол перекладки руля для удержания судна на курсе служат показателем устойчивости данного судна на заданном курсе.
Маневренные элементы судна в процессе его эксплуатации постоянно претерпевают изменения. Существенное влияние на них оказывают изменения гидрометеорологической обстановки, срок службы судна, характер обрастания подводной части корпуса судна и ряд других причин.
Маневренные элементы определяются по специальной программе на заводских и государственных испытаниях после постройки, капитального ремонта и модернизации судна. Проверочные определения маневренных элементов производятся после среднего ремонта, докования, длительной стоянки судна при интенсивном обрастании корпуса, смены гребных винтов или при обнаружении больших расхождений с данными предыдущих испытаний. Определение маневренных элементов проводят судоводители судна.
Поиск по сайту: