АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Метод переменных состояния
Метод переменных состояния (МПС) основывается на понятии «состояние системы», которое может быть описано набором физических переменных  . Переменные
. Переменные  характеризуют состояние системы в следующий момент времени, если известно текущее состояние и приложенные к системе возмущения.
характеризуют состояние системы в следующий момент времени, если известно текущее состояние и приложенные к системе возмущения.
Если  –начальный момент времени, то состояние САУ при
–начальный момент времени, то состояние САУ при  описывается системой уравнений:
описывается системой уравнений:
 , где:
, где:
 – набор задающих воздействий для соответствующего состояния
– набор задающих воздействий для соответствующего состояния  .
.
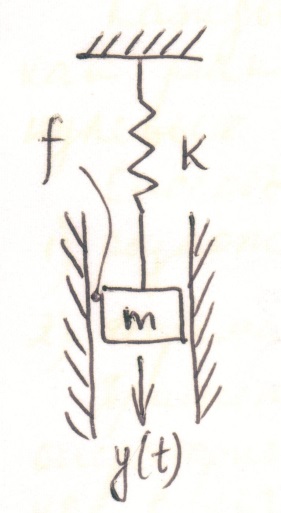 Рассмотрим пример:
Рассмотрим пример:
 ; (1)
; (1)
Введем переменные состояния: текущее положение груза  и скорость его перемещения
и скорость его перемещения  . Таким образом:
. Таким образом:
 ;
;
Тогда запишем уравнение (1) в переменных состояниях:
 или в форме Коши:
или в форме Коши:  .
.
В общем виде для системы n-го порядка система уравнений в переменных состояния выглядит следующим образом:

Полученную систему удобнее представить в матричной форме:
 , где:
, где:
 – вектор состояния;
– вектор состояния;
 – вектор входных переменных;
– вектор входных переменных;
 – квадратная матрица системы;
– квадратная матрица системы;
 – матрица уравнения.
– матрица уравнения.
Для полного описания САУ уравнение необходимо дополнить еще одним матричным уравнением, связывающим выходные переменные с текущим состоянием:
 , где:
, где:
 – вектор выходных переменных;
– вектор выходных переменных;
 – матрица выходов.
– матрица выходов.
Таким образом для описания САУ в переменных состояния имеем два уравнения:
 .
.
Решением (2) будет выражение вида:
 , где:
, где:
 – матрица Грина, фундаментальная матрица, переходная матрица.
– матрица Грина, фундаментальная матрица, переходная матрица.
Каждый из элементов матрицы Грина можно рассматривать как реакцию -ой переменной состояния при  и нулевых начальных значениях всех остальных
и нулевых начальных значениях всех остальных  .
.
Способы вычисления матрицы Грина:
1. Разложение в ряд:  , где I – един.матрица.
, где I – един.матрица.
2. Теорема Сильвестра, дающая аналитическое (точное) решение.
Применяя к (2), (3) преобразования Лапласа, получим операторное уравнение САУ в переменных состояния, записанных в матричной форме:
 ;
;
Отношение  – матричная передаточная функция.
– матричная передаточная функция.
Развитие МПС показало ограниченность классического способа описания САУ «вход-выход». Это связано с моментами наблюдаемости и управляемости.
Управлять можно  , наблюдать состояние САУ – измеряя
, наблюдать состояние САУ – измеряя  . Можно ли
. Можно ли  ?Или
?Или  ?
?
 – неуправляема;
– неуправляема;
 – ненаблюдаема.
– ненаблюдаема.

|

|

|

|

|

|

|

|

|

|

|

|
САУ называется полностью управляемой, если для любых и  и любых
и любых  и
и  существует
существует  ,
,  , переводящее САУ
, переводящее САУ  .
.
САУ называется наблюдаемой, если по данным измерения  и
и  на конечном интервале
на конечном интервале  можно однозначно определить
можно однозначно определить  .
.
САУ полностью наблюдаема, если наблюдаемы все ее состояния в произвольные моменты времени.
МПС и понятия наблюдаемости и управляемости легли в основу модального управления.
Поиск по сайту: