АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Фильтрация сигналов
Фильтрацию обычно применяют для отделения информативного сигнала от возмущений. Для предварительной обработки сигнала и его последующего анализа используют фильтры трех основных типов: фильтры нижних частот, фильтры верхних частот и полосовые фильтры.
Фильтр нижних частот (рис. 2.56) пропускает низкочастотные составляющие сигнала, подавляя составляющие на частотах выше граничной частоты (частоты среза).

Рис. 2.56. Пассивный R-C -фильтр нижних частот:
схема и частотная характеристика

Фильтры верхних частот (рис. 2.57) в основном используют для исключения собственного низкочастотного шума датчиков или других нежелательных частотных составляющих сигнала перед проведением анализа. Эти составляющие, хотя и не представляют интереса с точки зрения проводимого анализа, могут существенно перегрузить измерительное устройство, вызывая уменьшение его динамического диапазона.
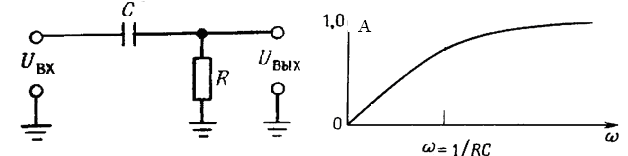
Рис. 2.57. Пассивный R-C-фильтр высоких частот: схема и частотная характеристика


Полосовые фильтры применяют для выделения определенных полос частот. Применение фильтрации особенно важно, если измерения проводят в широком динамическом диапазоне значений сигнала. Если в спектре сигнала, например, присутствуют составляющие, как с большими, так и с малыми амплитудами, то их нельзя оценить с одинаковой точностью ввиду ограничений на динамический диапазон измерительного устройства. В таких случаях может потребоваться «вырезать» составляющие с большой амплитудой, чтобы повысить точность анализа оставшихся компонент сигнала.
Поиск по сайту: