АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Управляемость объекта
Если объект полностью управляем, то всегда найдется такое допустимое управление, которое за конечное время обеспечит перевод объекта из любого начального состояния в любое заданное конечное состояние. Оценка управляемости осуществляется на основе критерия Р. Калмана, согласно которому для полной управляемости объекта необходимо и достаточно, чтобы выполнялось условие
 .
.
Ранг составной матрицы должен равняться порядку системы. Составная матрица имеет n строк и n´m столбцов: первые m столбцов – это столбцы матрицы B, следующие m столбцов - столбцы матрицы AB, затем - матрицы A 2 B и т. д.; последние m столбцов, с (n´m-m +1)-го по (n´m)-ый – столбцы матрицы A n -1 B.
Ранг матрицы определяется наивысшим из порядков миноров этой матрицы, отличных от нуля. Так как в рассматриваемой матрице n строк, то проверке подлежат все миноры n –го порядка, которые из нее можно составить (взяв любые n столбцов). Если хотя бы один из таких определителей не будет равен нулю, то критерий Калмана (2.67) выполняется и, следовательно, объект полностью управляем.
В частном случае, когда m = 1 (B = b – столбец размерностью n´ 1), проверка сводится к вычислению единственного определителя  .
.
Пример. Исследуем управляемость объекта в системе двигатель – редуктор–нагрузка.
Математическая модель этой системы была получена ранее:
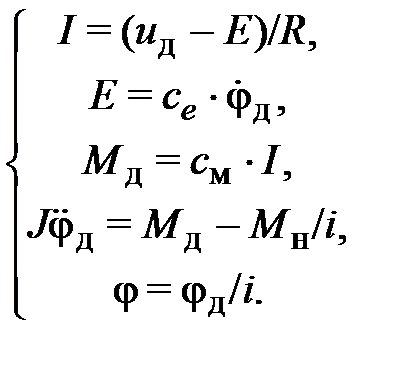
Запишем уравнения динамики в форме Коши:

Входом системы является напряжение  , подаваемое на двигатель, выходом – угловое положение вала нагрузки
, подаваемое на двигатель, выходом – угловое положение вала нагрузки  Величина
Величина  является возмущением (момент нагрузки).
является возмущением (момент нагрузки).
Запишем уравнения модели в матричном и стандартном видах


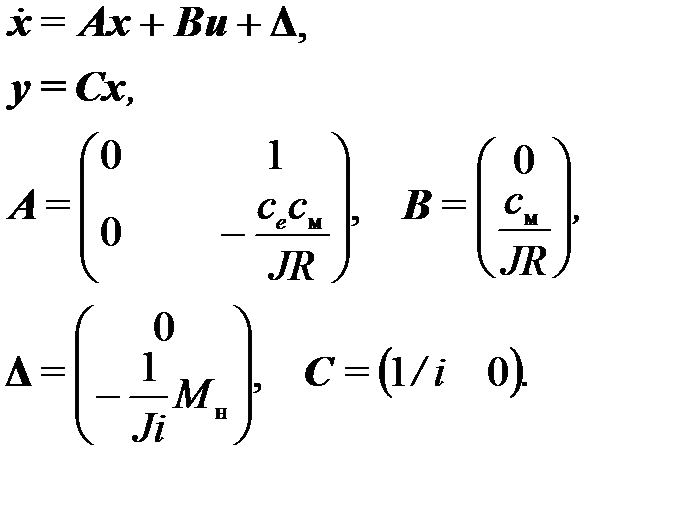
где 
Найдем определитель блочной матрицы  . В нашем случае n = 2, m = 1 (две переменные состояния и один управляющий сигнал).
. В нашем случае n = 2, m = 1 (две переменные состояния и один управляющий сигнал).
 .
.
Блочная матрица  принимает вид
принимает вид  :
:
 .
.
Ее определитель не равен нулю и, значит, ранг этой матрицы равен 2. Критерий Калмана выполняется, рассматриваемая система является полностью управляемой. За счет выбора управляющего сигнала  можно обеспечить любые значения угловой скорости wд =
можно обеспечить любые значения угловой скорости wд =  и углового ускорения eд =
и углового ускорения eд =  вала двигателя.
вала двигателя.
Отметим, что в некоторых случаях проверка критерия Калмана упрощается – в случае, когда матрица А объекта имеет каноническую диагональную форму (2.68) или каноническую жорданову форму (2.69), а также при известном ранге матрицы B.
Если матрица А объекта имеетканоническую диагональную форму (2.68), то согласно критерию Е. Гильберта для полной управляемости такого объекта необходимо и достаточно, чтобы матрица В не содержала нулевых строк.


где l1 ¹ l2 ¹ … ¹ ln.
Если матрица A объекта имеет каноническую жорданову форму (2.69), то для полной управляемости такого объекта необходимо и достаточно, чтобы последняя строка матрицы B была ненулевой.


Наконец, если модель объекта может быть представлена в нормальной форме, когда в качестве переменных состояния выбираются сама управляемая величина y и n –1 ее производных, то такой объект полностью управляем.
В этом случае



На практике для исследования управляемости ранги обычно не считают, а используют компьютерные программы. В частности, в MATLAB функция ctrb собирает аргумент B, AB, A 2 B, …, а функция rank считает определитель: rank (ctrb (A,B)).
Управляемость по выходу
 Критерий полной управляемости по выходу в общем случае имеет вид
Критерий полной управляемости по выходу в общем случае имеет вид

где q – число выходных переменных объекта (или число строк матрицы C).
Для примера с двигателем имеем:
y = j Þ q = 1.

Определитель не равен нулю, ранг равен единице. Критерий полной управляемости по выходу выполнен. Следовательно, за счет выбора управляющего сигнала  можно обеспечить любые значения выхода (углового положения нагрузки).
можно обеспечить любые значения выхода (углового положения нагрузки).
Поиск по сайту: