АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Точность систем автоматического управления
Рассматривается типовая структура САУ (рис. 2.49):
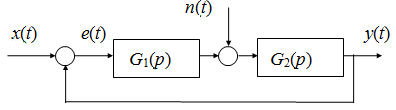
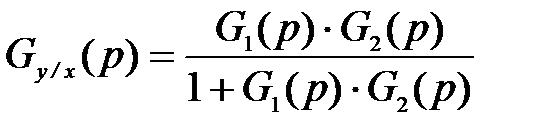 Рис. 2.49. Типовая структура САУ
Рис. 2.49. Типовая структура САУ
x (t) – полезный, задающий сигнал; n (t) – помеха, возмущение.
y (t) = Gy/x (p) x (t) + Gy/n (p) n (t) – суперпозиция.
Ошибка отработки полезного сигнала, которая характеризует точность САУ:
e (t) = x (t) – y (t) = [1 – Gy/x (p)] x (t) – Gy/n (p) n (t) = Ge/x (p) x (t) + Ge/n (p) n (t),
где e 1(t) = Ge/x (p) x (t) – ошибка по полезному сигналу, e 2(t)= Ge/n (p) n (t) – ошибка по помехам.
Значение ошибки e (t) определяется не только свойствами собственно системы, но и значениями внешних сигналов x (t) и n (t). Следовательно, нельзя по значениям e (t) сказать: «хорошая» система или «плохая». Хорошо было бы обеспечить, чтобы Gy/x (p) = 1 и Gy/n (p)= 0, но одновременно выполнить оба условия, как правило, не удается. Поэтому для характеристики точности системы вводят другие показатели. Различают два случая:
– отработка полиномиальных воздействий;
– отработка периодических воздействий.
2.5.1 Точность при полиномиальных (степенных) воздействиях
Рассматривается случай, когда внешние сигналы (задающие и возмущающие) можно представить в виде конечных рядов:
В частности, при постоянном задающем сигнале
x (t) = x 0 (a 0 = x 0; ai = 0 при i > 0),
при линейном –
x (t) = x 0 + a t (a 0 = x 0; a 1 = a, ai = 0 при i > 1)
и т. д.
Принято в этом случае точность системы характеризовать коэффициентами ошибок:


Отдельные коэффициенты имеют названия:
c 0 – коэффициент ошибки по положению для задающего сигнала;
c 1 – коэффициент ошибки по скорости для задающего сигнала;
c 2 – коэффициент ошибки по ускорению для задающего сигнала;
d 0 – коэффициент ошибки по положению для возмущения;
d 1 – коэффициент ошибки по скорости для возмущения.
Значения коэффициентов ошибок могут быть легко вычислены.
e (t) = [1 – Gy/x (p)] x (t) = Ge/x (p) x (t).


с 0 = Ge/x (0), с 1=  ,... или с 0 = 1 – Gy/x (0), с 1=
,... или с 0 = 1 – Gy/x (0), с 1=  ,...
,...
Аналогично для коэффициентов ошибок по помехе

Поиск по сайту: